

Servo controller
A technology of servo controllers and controllers, applied in the field of servo controllers, can solve problems such as small changes, large changes, and fluctuations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
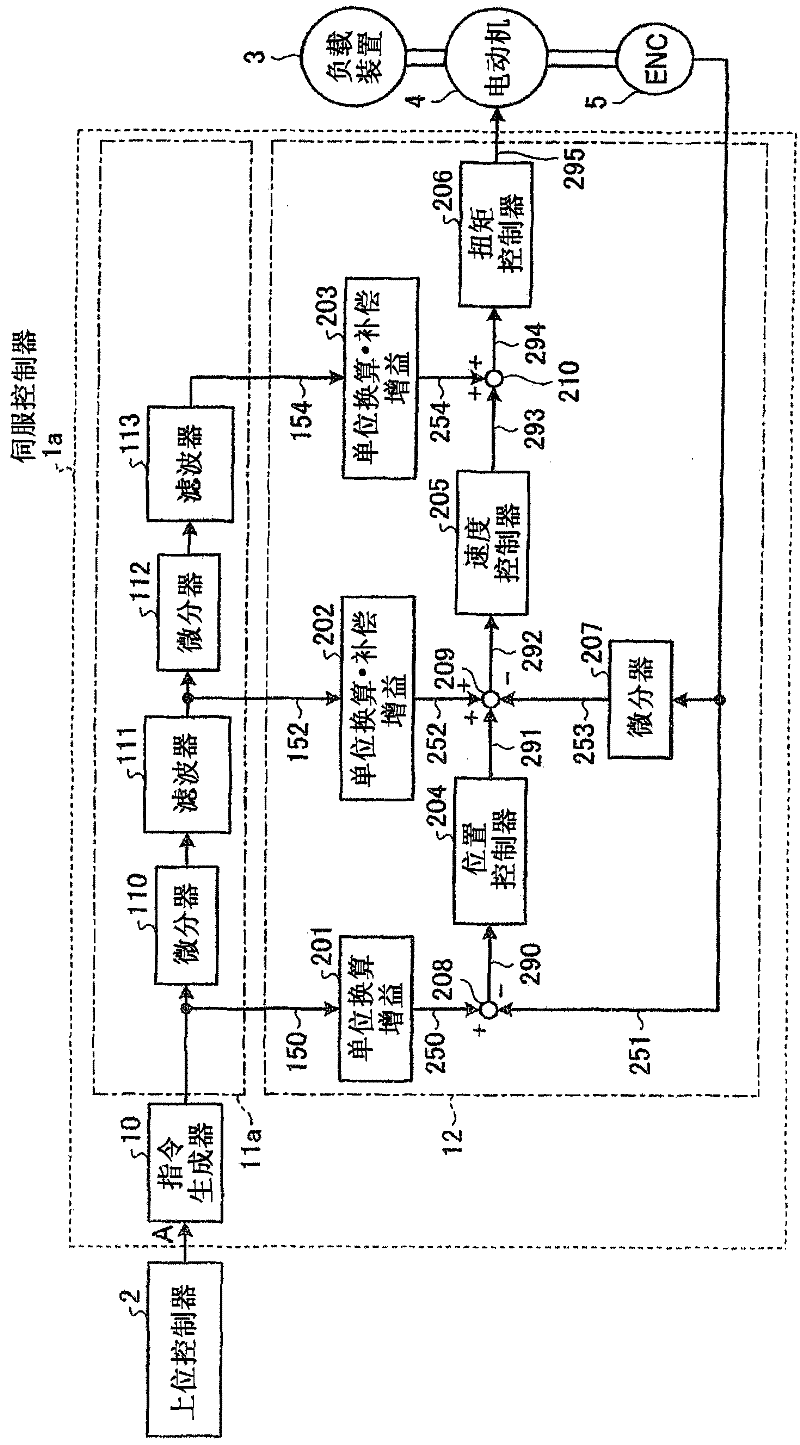
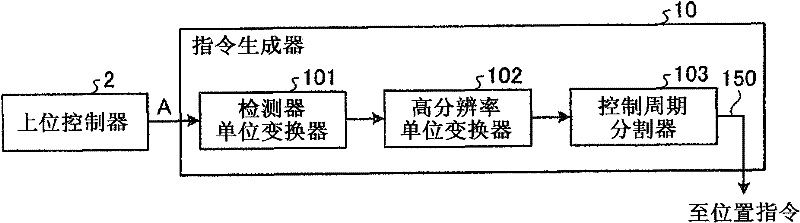
[0025] figure 1 It is a block diagram showing the configuration of the servo controller according to Embodiment 1 of the present invention. figure 2 yes means figure 1 A block diagram of a configuration example of the instruction generator shown.
[0026] exist figure 1 Among them, the servo controller 1 a drives the motor 4 incorporated in the load device 3 according to the position command A input from the controller 2 . A low-resolution position detector (ENC) 5 is mounted directly on or near the motor 4 . The servo controller 1 a uses the motor position information 251 detected by the position detector 5 as a feedback signal when driving the motor 4 .
[0027] The servo controller 1 a has: a command generator 10 ; a feedforward controller 11 a ; and a feedback controller 12 .
[0028] The instruction generator 10 will be described in detail later, and it uses, for example, figure 2 In the structure shown, the position command A input from the controller 2 is conver...
Embodiment approach 2
[0049] Figure 5 It is a block diagram showing the configuration of the servo controller according to Embodiment 2 of the present invention. In addition, in Figure 5 in, for with figure 1 The same or equivalent components shown in (Embodiment 1) are denoted by the same reference numerals. Here, description will be made centering on parts related to Embodiment 2. FIG.
[0050] Such as Figure 5 As shown, the servo controller 1b according to the second embodiment is configured such that figure 1 In the servo controller 1a shown in (Embodiment 1), a feedforward controller 11b is provided instead of the feedforward controller 11a.
[0051] The feed-forward controller 11b is called a so-called model-following type, which simulates the ideal motion of motors and machines including motors, and performs control in a manner to follow the ideal motion. The feed-forward controller 11b has an adder 120, a model position control 121, adder 122, model speed controller 123, motor mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More