

Improved fireflyalgorithm based AUV (autonomous underwater vehicle) three-dimensional track planning method
A firefly algorithm and route planning technology, applied in the field of AUV three-dimensional route planning based on the improved firefly algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The three-dimensional path planning method of the underwater submersible based on the improved firefly algorithm of the present invention will be described in detail below.
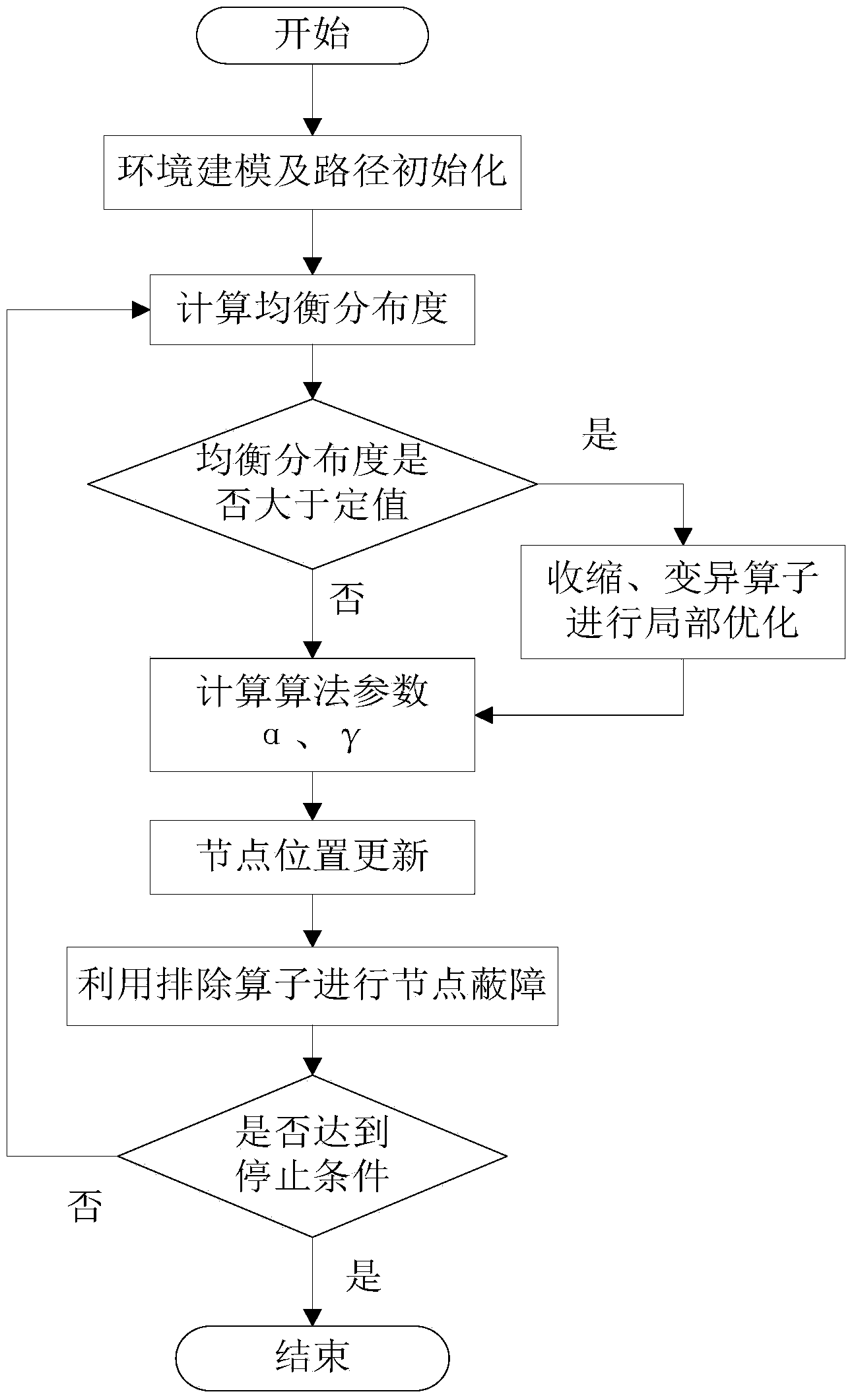
[0041] The invention discloses a three-dimensional path planning method for an underwater submersible based on an improved firefly optimization algorithm, and belongs to the technical field of three-dimensional path planning for an underwater submersible. In the invention, the firefly algorithm parameter self-adaptive calculation method is proposed, which improves the optimization ability of the firefly algorithm itself, and enables effective search in a large-scale space. At the same time, the AUV three-dimensional path planning scheme is proposed, and the improved firefly algorithm is applied to it, and by adding exclusion operators, mutation operators and contraction operators in the planning, the algorithm can quickly find the optimal path, and the planning speed and planning speed of the algori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More