

Bionic quadruped robot
A quadruped robot and bionic technology, applied in the field of robotics, can solve the problems of high production cost, multiple drives, and high energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
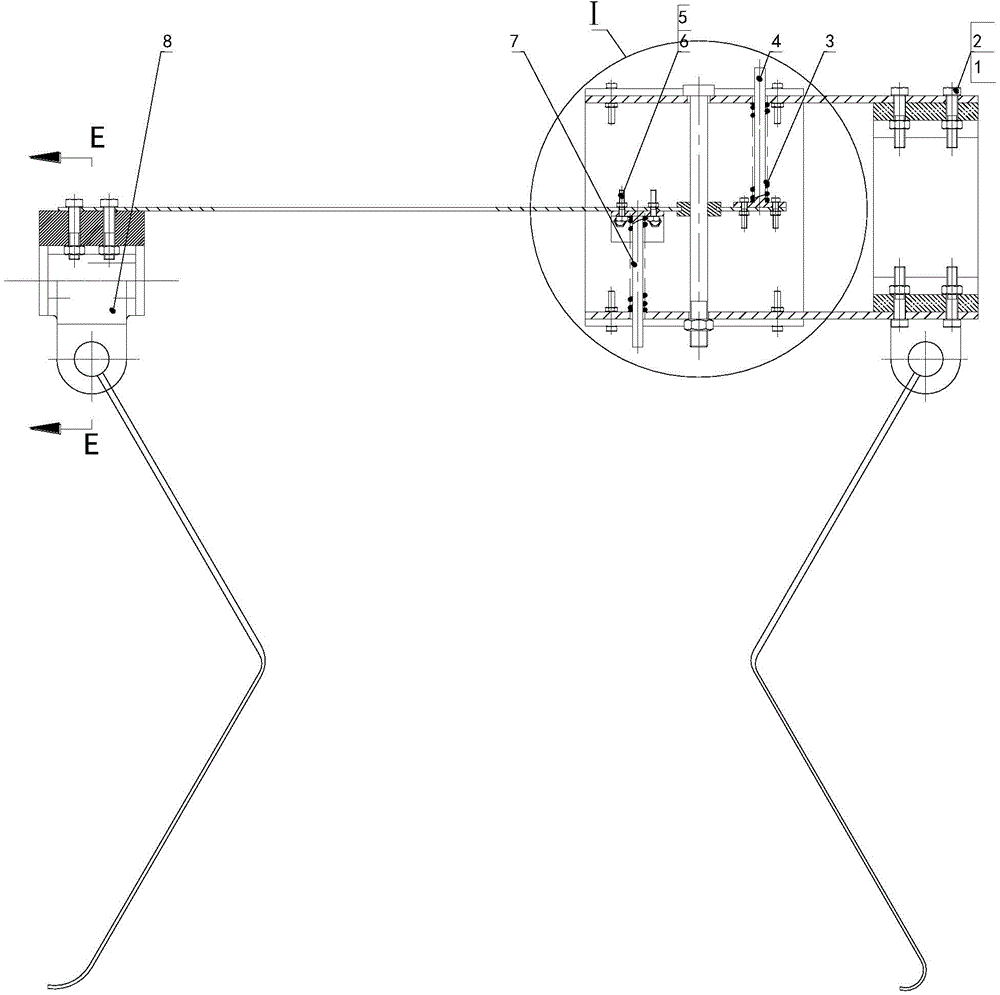
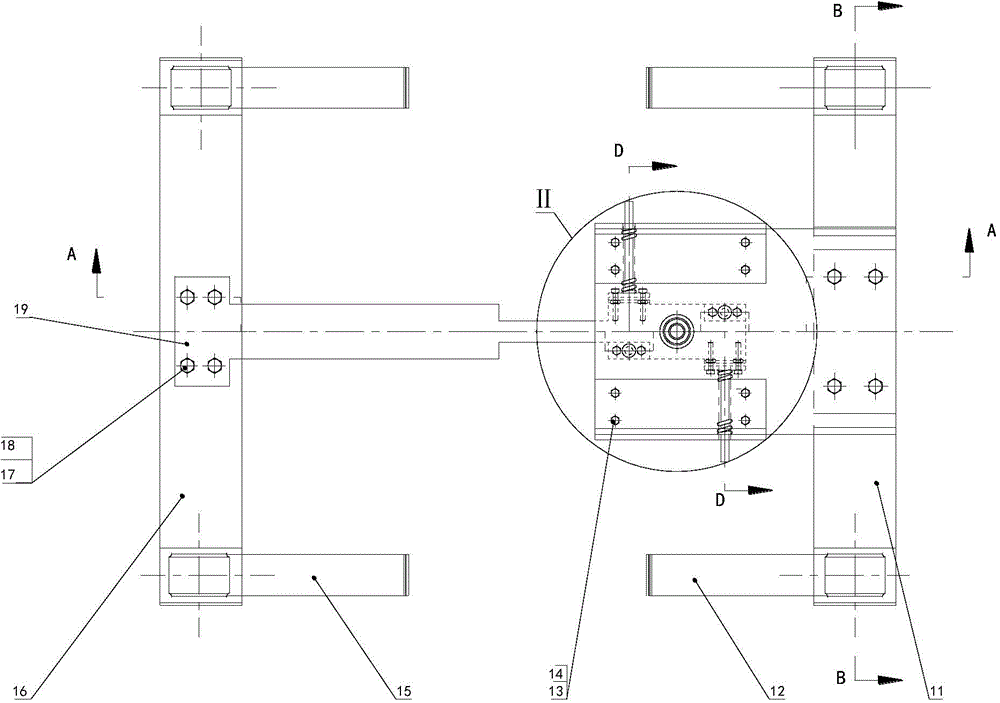
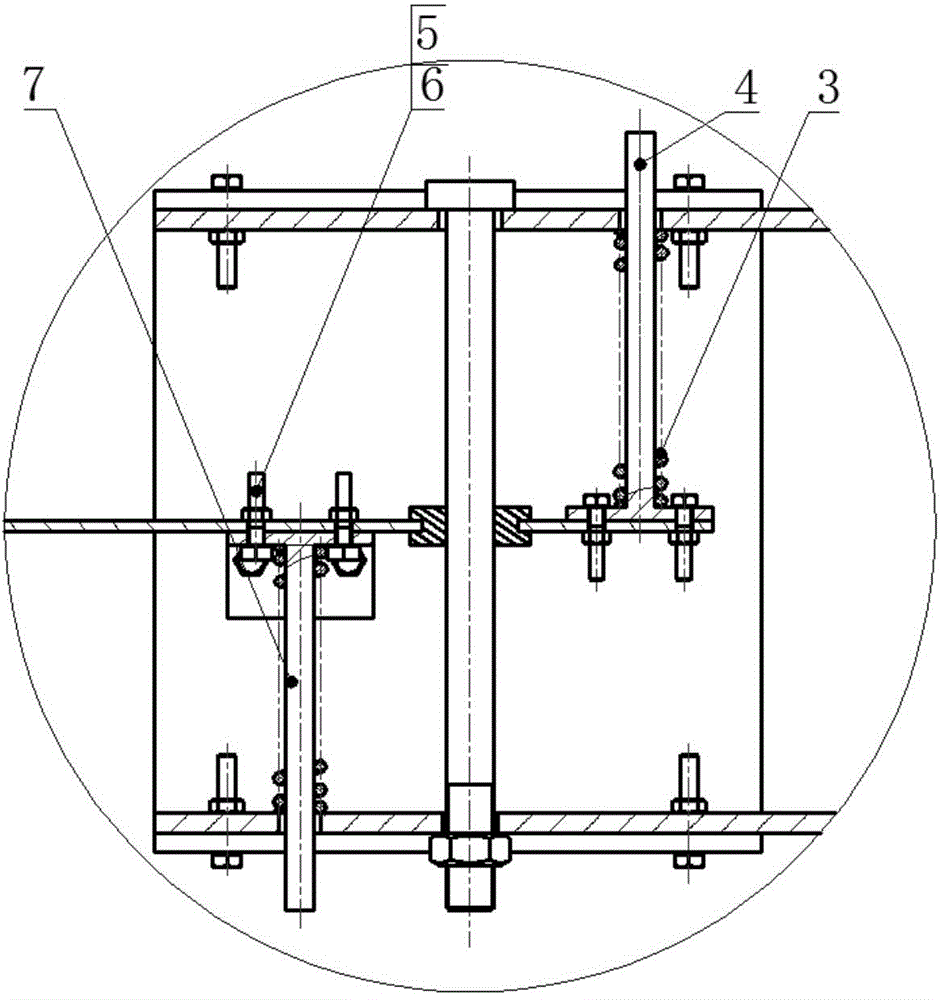
[0035] Such as Figure 1-11 As shown, the bionic quadruped robot is mainly composed of four flexible legs, four hip joints 8, front shoulder beam 16, rear shoulder beam 11, front spine 19, and rear spine. The legs include two pairs of legs, front and back, and the four legs are connected to the front shoulder beam 16 and the rear shoulder beam 22 through four hip joints 8 respectively. Each hip joint 8 has two degrees of freedom (pitch and roll). The hip joint 8 is horizontally provided with two cross holes, and the hip joint 8 passes through the upper and lower holes respectively through the pin shaft and is hinged with the upper end of the leg and the front and rear shoulder beams 16 and 11. The back spine is fixed on the back shoulder beam 11.
[0036] Each of the four flexible legs is an integrated structure of thigh and calf. The thigh is a rigi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More