

Four-degree-of-freedom stepper motor driving joint-type manipulator
A stepping motor and joint-type technology, applied in the field of manipulators, can solve the problems of low modularity, low dynamic performance, complex structure, etc., and achieve the effect of high modularization, good dynamic performance and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
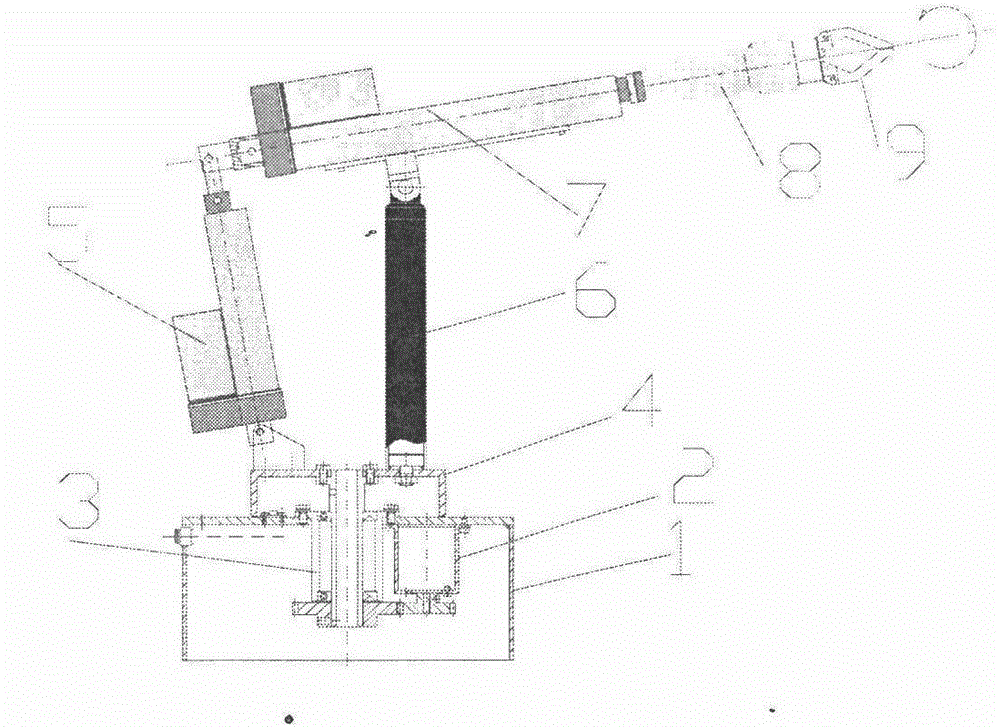
[0007] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
[0008] A four-degree-of-freedom stepping motor-driven multi-joint manipulator, consisting of 1 base, 2 rotary motors, 3 rotary mechanisms, 4 rotary tables, 5 pitching stepping motor push rods, 6 columns, 7 telescopic stepping motor push rods, 8 Composed of a rotatable wrist and 9 claws, the column and the pitch stepping motor push rod are installed on the turntable, the pitch stepping motor push rod is connected with the telescopic stepping motor push rod through a hinge, and the telescopic stepping motor push rod is installed on the column On the top, the telescopic stepping motor push rod is connected with the rotatable wrist, the gripper is installed on the rotatable wrist, and the slewing motor and the transmission mechanism are installed in the base and connected with the turntable.
[0009] The pitching stepper motor push rod converts the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More