

Four-degree-of-freedom electric joint-type mechanical arm for teaching
An electric manipulator and articulated technology, applied in the field of manipulators, can solve the problems of high cost, difficult disassembly and assembly, complex structure, etc., and achieve the effects of low cost, simple structure, and convenient disassembly and assembly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
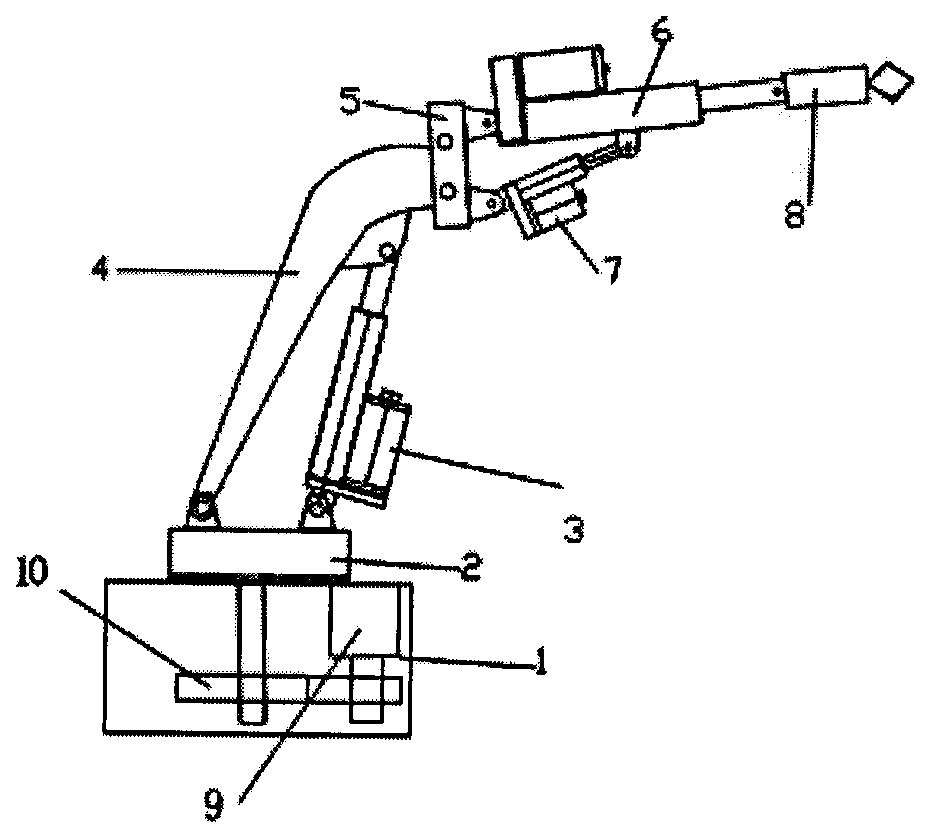
[0007] The technical solution of the present invention will be further described below with reference to the accompanying drawings.
[0008] A four-degree-of-freedom joint-type teaching electric manipulator, which consists of a base, a turntable, a large arm pitch electric push rod, a large arm, a connecting block, a telescopic electric push rod, a small arm pitch electric push rod, and a gripper. The large arm is installed on the On the turntable, the big arm pitch electric push rod is connected with the turntable and the big arm through the hinge, the connecting block is installed on the big arm, the small arm pitch electric push rod is connected with the connecting block and the telescopic electric push rod through the hinge, and the claw is installed On the telescopic electric push rod, the rotary table is driven by the rotary motor and the transmission mechanism in the base.
[0009] The outstanding advantages of the present invention are: the big arm pitching electric pu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More