

A Pneumatic Adaptive Door Opening Manipulator
An adaptive, manipulator technology, applied in the field of manipulators, can solve problems such as forward line resistance, and achieve the effect of simplifying the control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
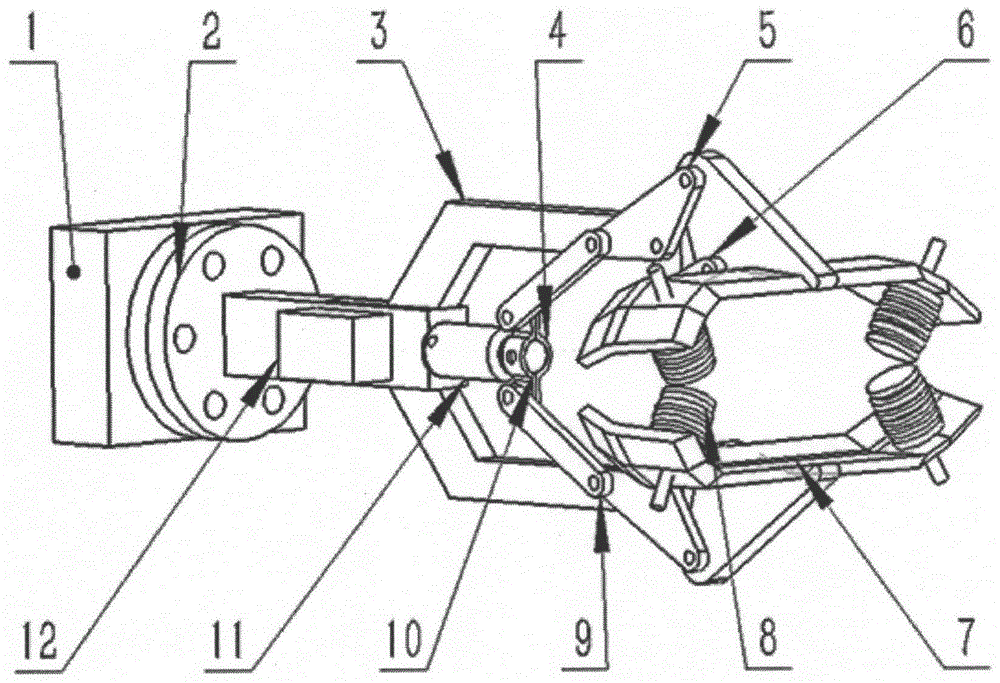
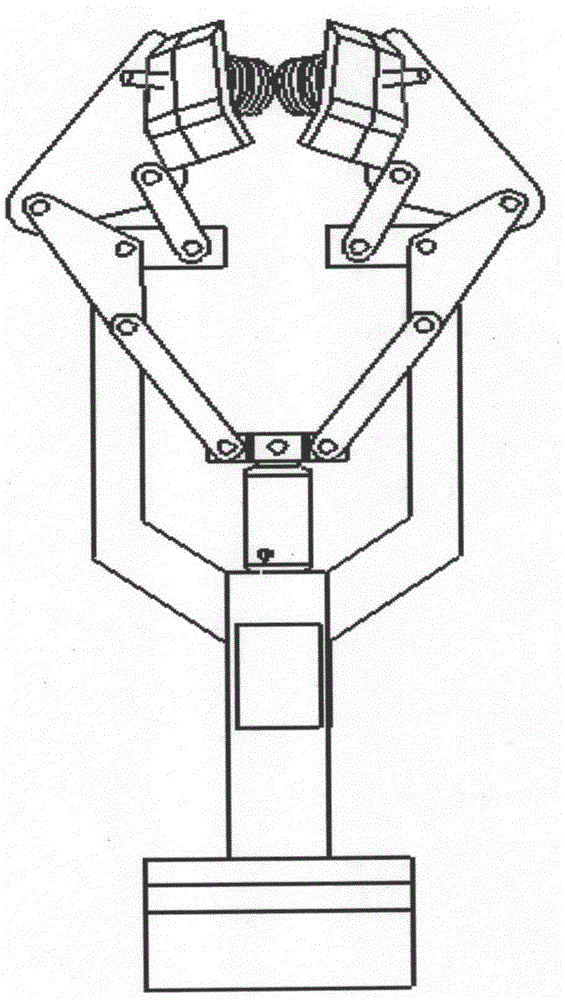
[0024] Such as figure 1 and figure 2 Shown is a schematic structural diagram of a pneumatic adaptive door opening manipulator. The pneumatic adaptive door opening manipulator includes a pneumatic control part, a clamping part, a supporting part and a rotating part. The rotating part includes a rotating cylinder 1 and a rotating part. The connecting plate 2, the support part includes the support claw 3, the first connecting rod 9, the second connecting rod 5 and the third connecting rod 6, and the clamping part includes the tiger mouth clamp 7 and the first air bag 8, the first The airbag 8 is located on the inside of the tiger's mouth clamp 7. The pneumatic control part includes a rotating cylinder 1 and a telescopic cylinder 11. One end of the supporting claw 3 is fixedly connected to the cylinder rod of the rotating cylinder 1 through an adapter plate 2, and the other end of the supporting claw 3 Connect the middle part of the second connecting rod 5 and one end of the thi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More