

Multifunctional gait rehabilitation training device
A training device and multi-functional technology, applied in the field of medical rehabilitation training devices, can solve problems such as ignoring the key role of the toe joint, and achieve the effect of real-time controllable ankle posture and adjustable step length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
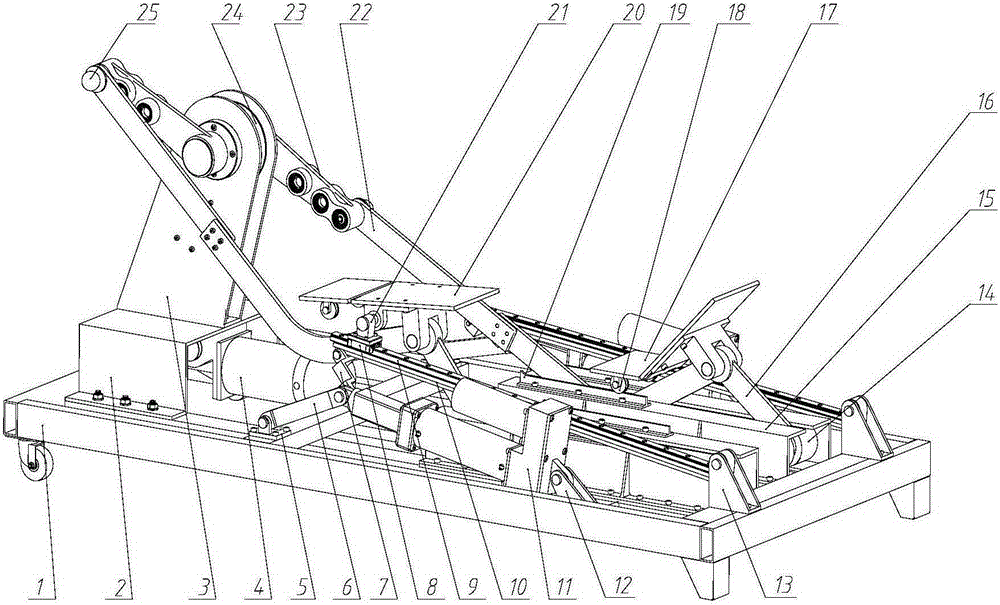
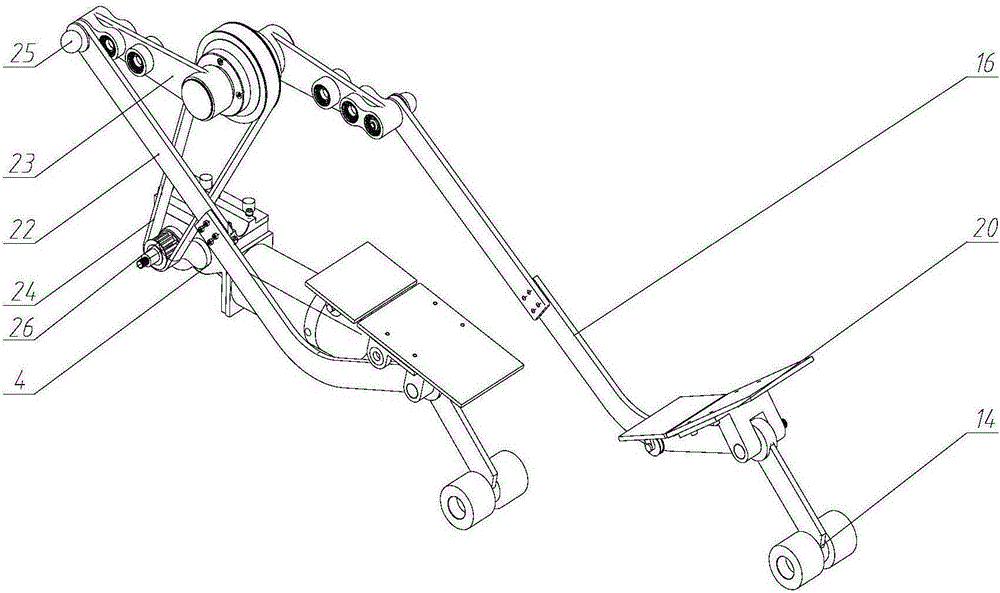
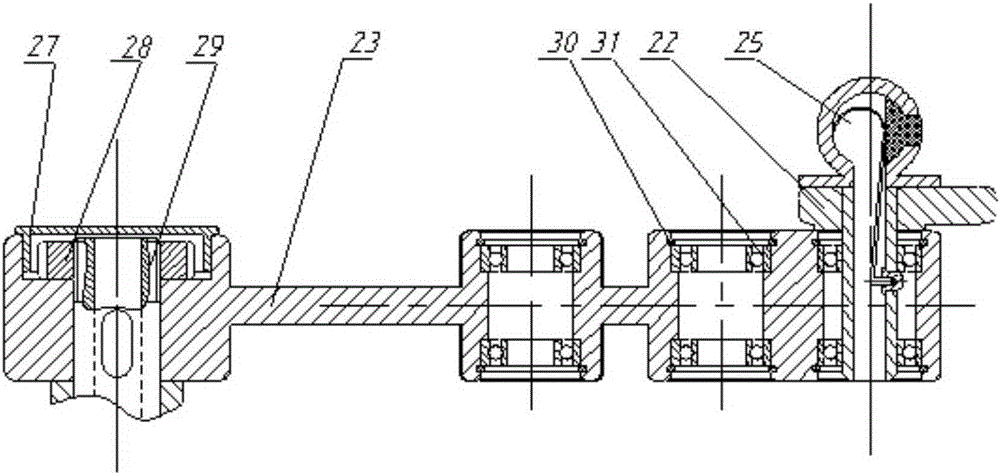
[0019] refer to Figure 1-8 As shown, a multifunctional gait rehabilitation training robot is mainly composed of a support frame, a gait motion simulation mechanism, an ankle posture adjustment mechanism, a phalanx joint rehabilitation mechanism, etc.; the support frame is mainly composed of frame 1, Composed of motor bracket 2, U-shaped vertical plate 3, roller groove 15, etc., two universal wheels are installed in front of the lower end of frame 1, and there are rubber pads at each corner of the lower end rear; the motor bracket 2 is fixed on the machine by bolts. In front of the frame 1, the U-shaped vertical plate 3 is fixed directly above the motor bracket 2 through hexagon socket screws; the roller groove 15 is fixed at the rear of the frame 1 through hexagon socket head screws, and the two roller grooves 15 are arranged in para...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More