

Realization method of nonlinear robust position controller for electro-hydraulic servo system based on discontinuous projection mapping
An electro-hydraulic servo system and projection mapping technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of complex adaptive controller design that cannot guarantee parameter estimation and error sign integral robustness. Modeling problems such as uncertain high-gain feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
[0087] Aspects of the invention are described in this disclosure with reference to the accompanying drawings, which show a number of illustrated embodiments. Embodiments of the present disclosure are not necessarily intended to include all aspects of the invention. It should be understood that the various concepts and embodiments described above, as well as those concepts and embodiments described in more detail below, can be implemented in any of a number of ways, which should be the concepts and embodiments disclosed by the present invention and not Not limited to any implementation. In addition, some aspects of the present disclosure may be used alone or in any suitable combination with other aspects of the present disclosure.
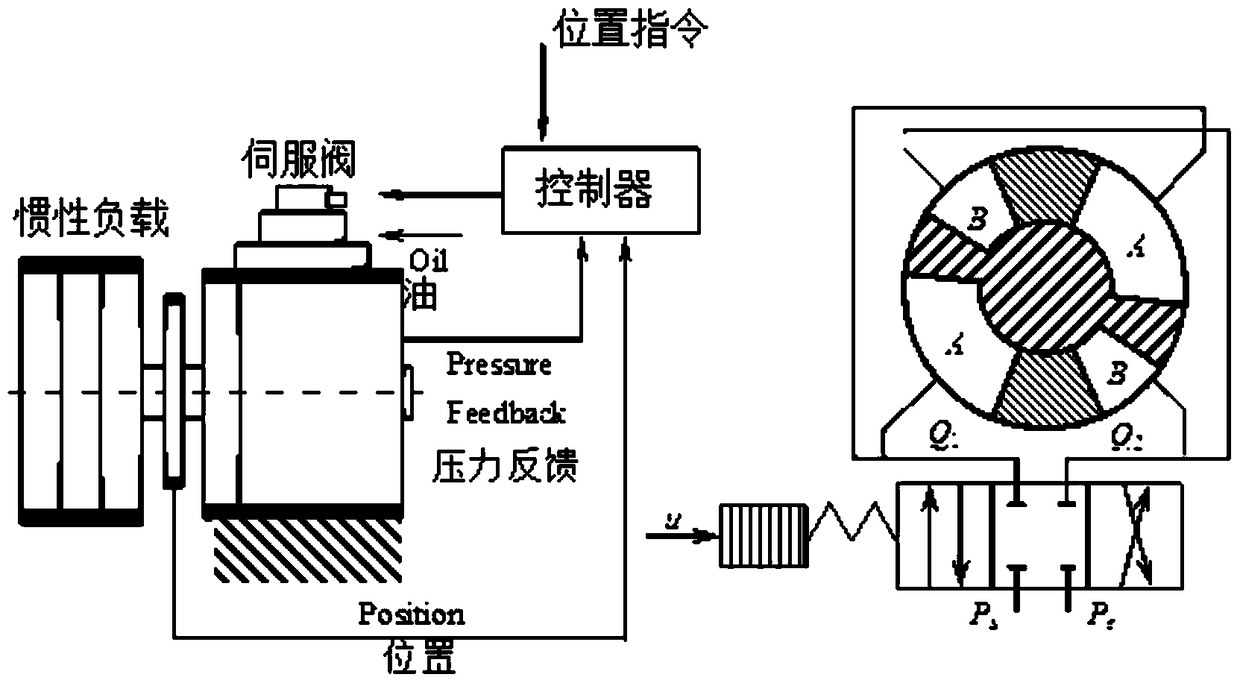
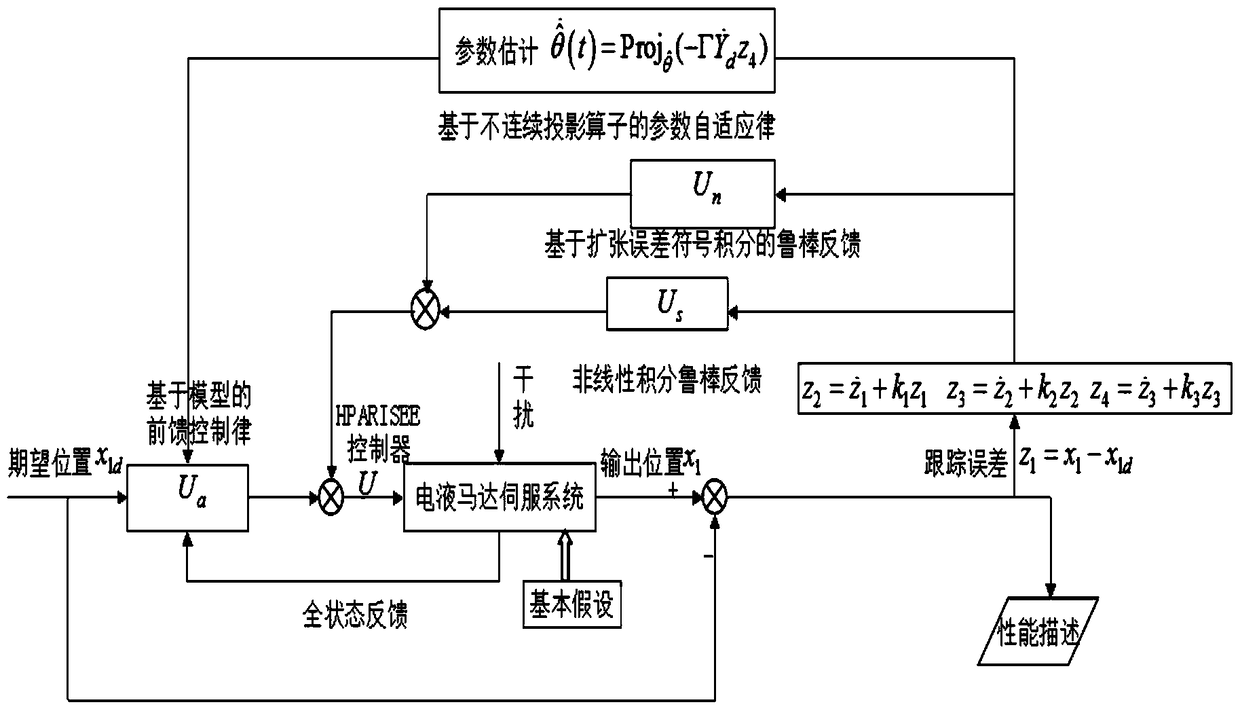
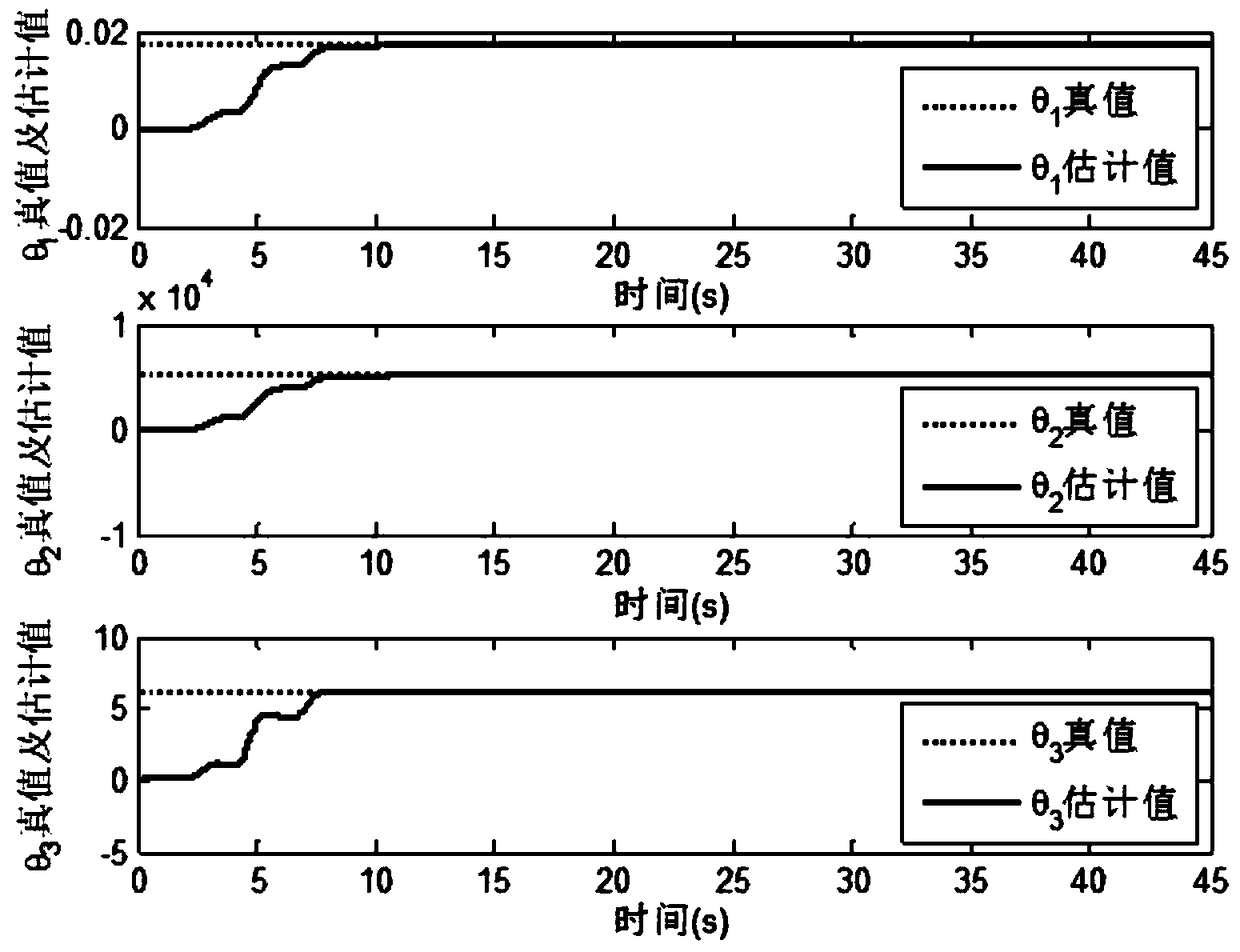
[0088] to combine Figure 1 to Figure 2 To illustrate this embod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More