

An active fault-tolerant control method for an electro-hydraulic servo system
An electro-hydraulic servo system, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of no robust effect, less recovery performance, and great design difficulty, and achieve economical savings. Cost, control voltage continuous, effect of reducing quantity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
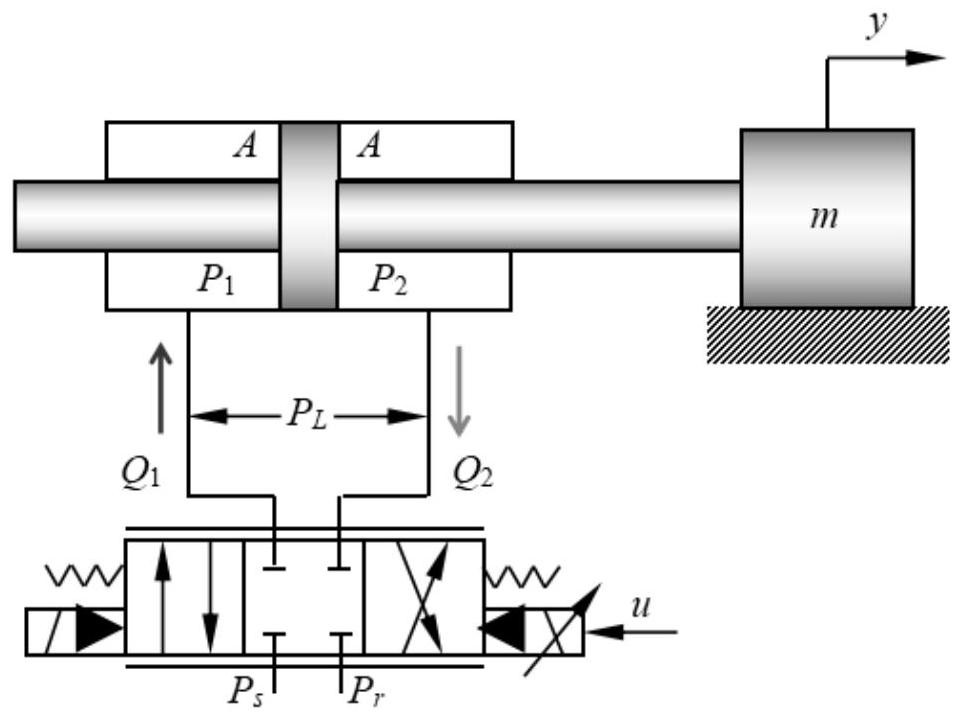
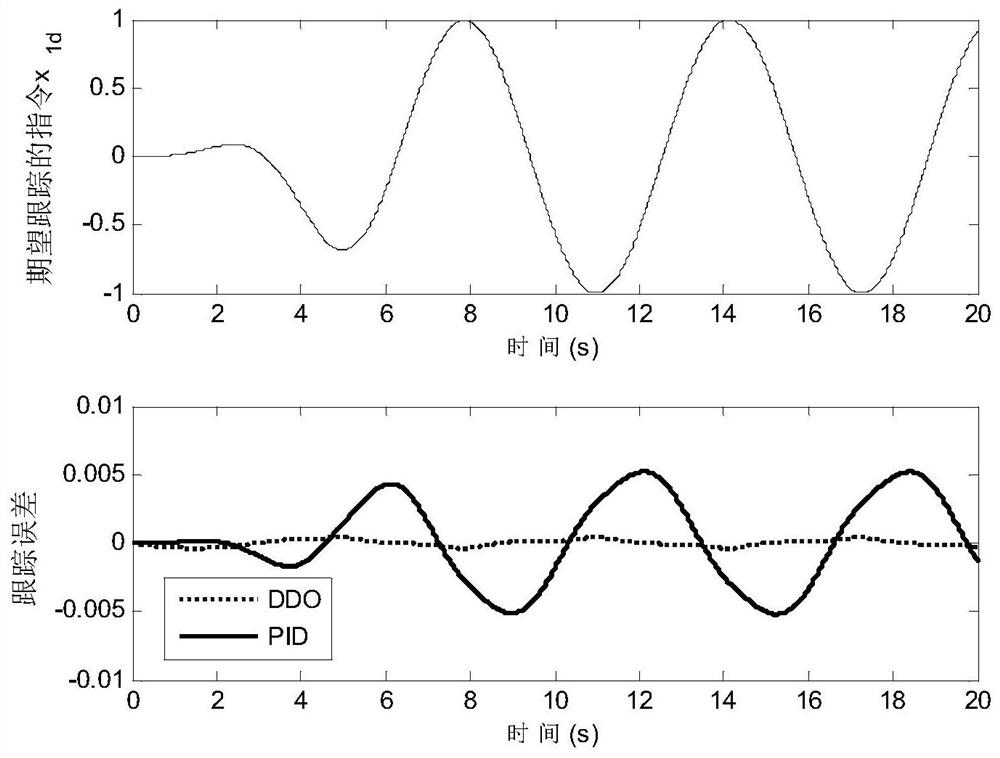
[0158] The parameters of the electro-hydraulic position servo system are: load mass m=30kg; piston rod area A=9.0478×10 -4 m 2 ;Total leakage coefficient C t =3×10 -12 m 3 / s / Pa; oil supply pressure P s =1×10 7 Pa; viscous friction coefficient B=90N·s / m; hydraulic oil elastic modulus β e =7×10 8 Pa; servo valve total flow gain k t =1.1969×10 -8 m 3 / s / V / Pa -1 / 2 ; the total volume of the control chamber V t =1.16×10 -4 m 3 ; Add the time-varying external disturbance d(t)=200sin(t)N to the system to simulate the non-matching additive fault and model uncertainty in the system, and add the time-varying external disturbance Q(t)=1×10 -6 sin(t)m 3 / s to simulate matching additive faults and model uncertainty in the system; the position command the system expects to track is curve x 1d (t)=sin(t)[1-exp(-0.01t 3 )].
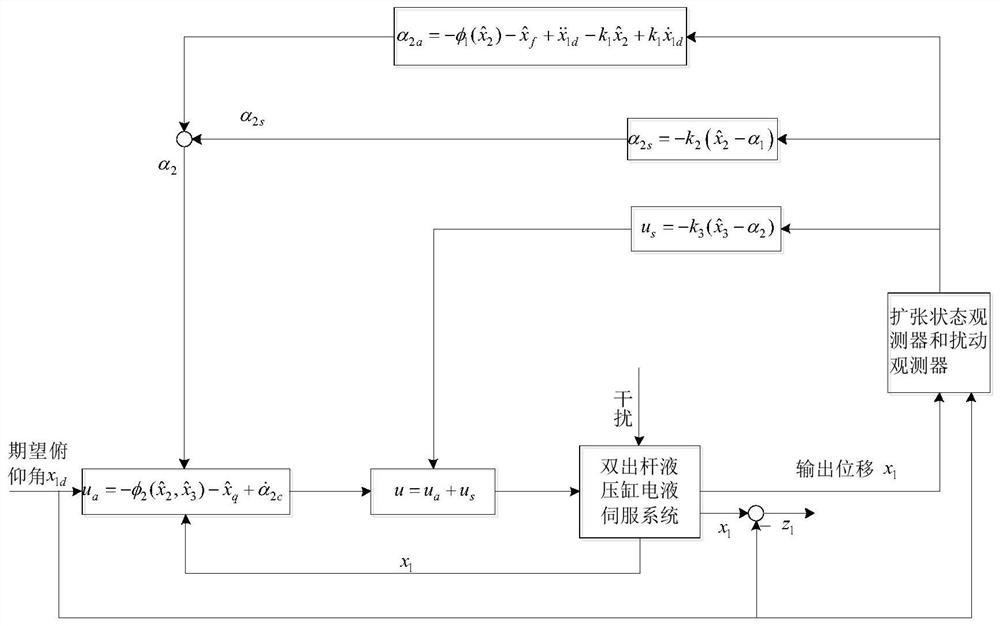
[0159] Contrast simulation parameters: the parameters of the controller designed by the present invention are selected as: ω 0 =50, l=2, k 1 =500, k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More