

Nonlinear Robust Position Control Method for Electro-hydraulic Servo System with Time-Varying Output Constraints
An electro-hydraulic servo system, output constraint technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of high gain feedback, output tracking error and jitter phenomenon that cannot be arbitrarily constrained, and achieve great flexibility performance, improve robustness, and control the effect of voltage continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
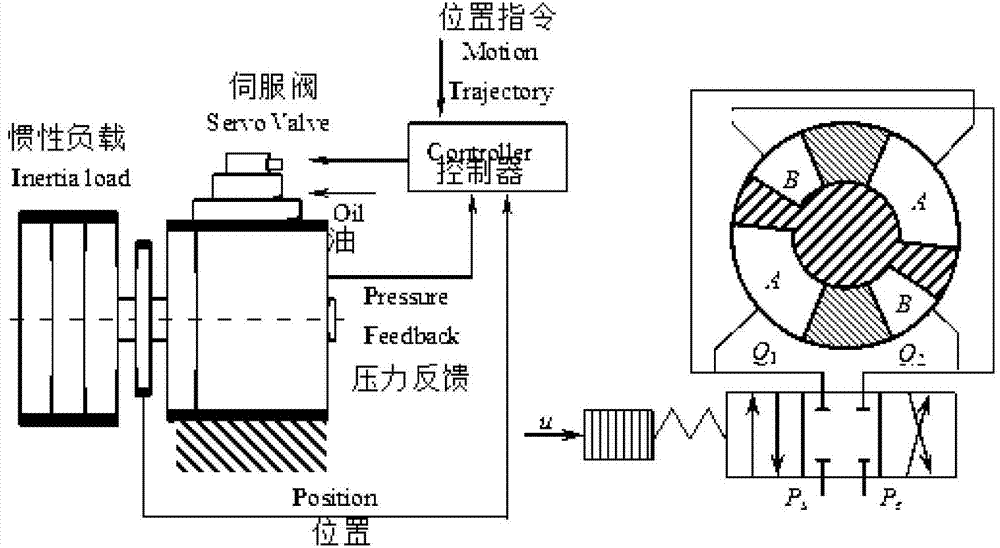
[0024] combine figure 1 , figure 2 As shown, according to a preferred embodiment of the present invention, a nonlinear robust position control method of an electro-hydraulic servo system with time-varying output constraints, its realization includes the following steps:
[0025] Step 1, establishing a mathematical model of the electro-hydraulic position servo system;
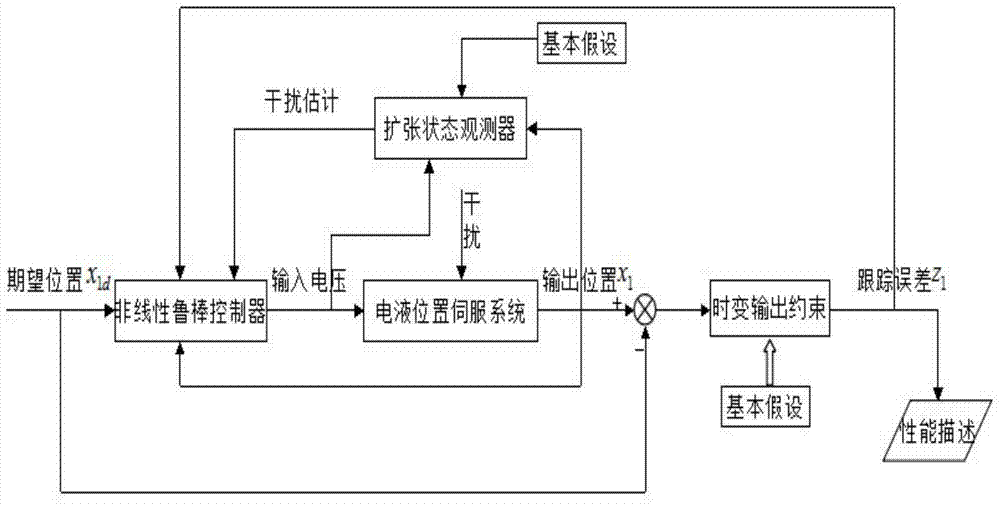
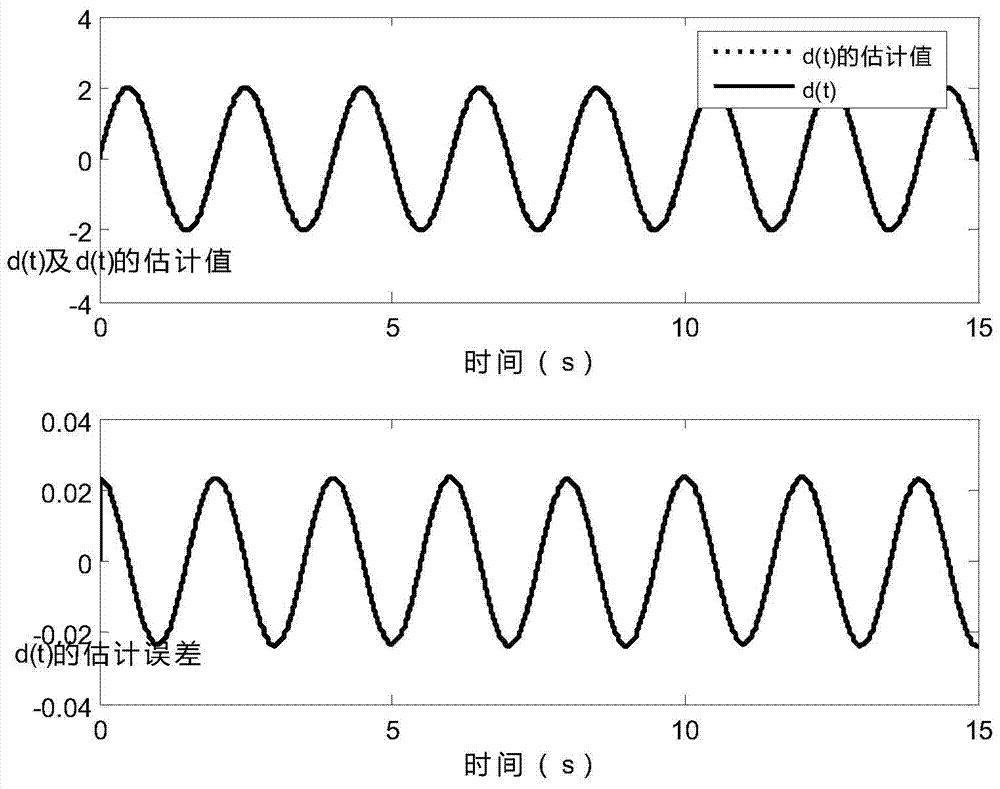
[0026] Step 2. Design an extended state observer to estimate the disturbance of the electro-hydraulic position servo system;
[0027] Step 3. Design an adaptive robust position controller for the electro-hydraulic servo system with time-varying output constraints;
[0028] Step 4, adjusting the parameters so that the position output of the electro-hydraulic position servo system accurately tracks the desired position command, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More