

Fusion Adaptive Robust Force Control Method for Electro-hydraulic Load Simulator
An adaptive robust and load simulator technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as uncertain nonlinearity, system instability, and reduced system tracking performance, and achieve Effects of continuous control voltage, improved accuracy, and improved tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0110] The parameters of the load simulator for double-vane hydraulic motor force control are: A=2×10 -4 m 3 / rad, B=800N m s / rad, β e =2×10 8 Pa, C t =9×10 -12 m 5 / (N·s), P s =21×10 6 Pa, P r = 0 Pa, V01 =V 02 =1.7×10 -4 m 3 , J=0.32kg·m 2 ;
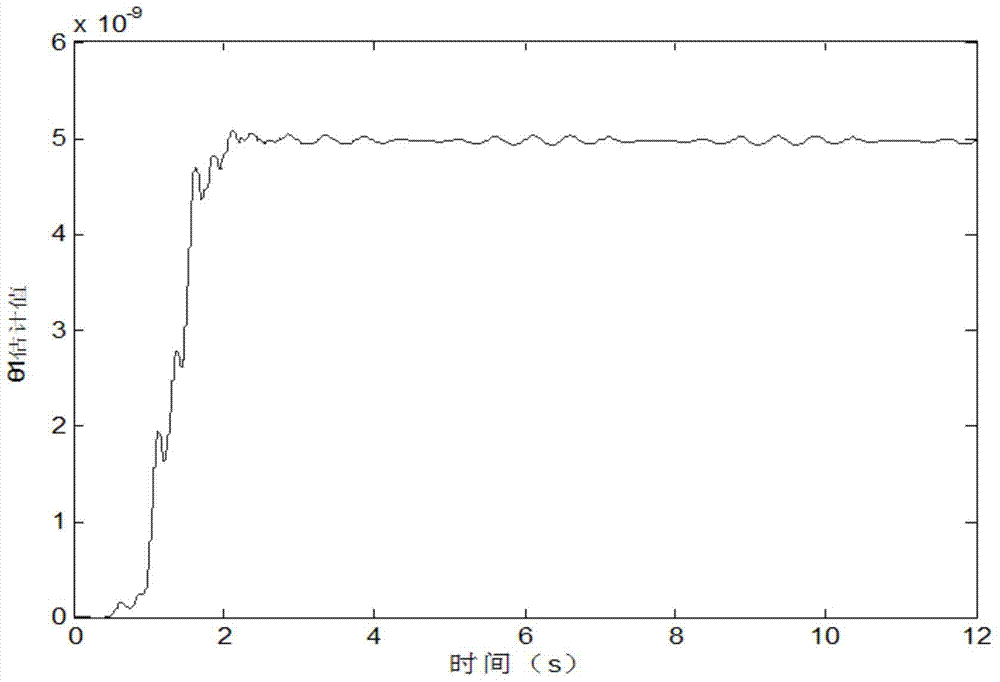
[0111] Comparing the simulation results: During the simulation, the purpose of adjusting the gain k and h is the same. In order to facilitate the simulation, the control performance can be satisfied by only adjusting the value of the gain k, and then the adjustment gain h can be omitted. The controller parameters designed in this embodiment are selected as: k=5×10 -6 , gamma 1 =0.01, the adaptive law parameter is selected as Γ 1 =0.5×10 -7 , Γ 2 =0.5×10 -13 , Γ 1 =0.2; the estimation range of system parameters is selected as: θ min =[0,0,0] T , θ max =[1×10 -8 ,1.8×10 -11 ,8×10 -6 ] T .
[0112] The time-varying external disturbance of the system is selected as d=200sint, and the trajectory is The torque ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More