

A method and system for capturing target teaching points
A teaching point and teaching point technology, applied in the field of industrial teaching robot control, can solve problems such as time-consuming, improve efficiency, and solve the inconvenience of returning to modify teaching point parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
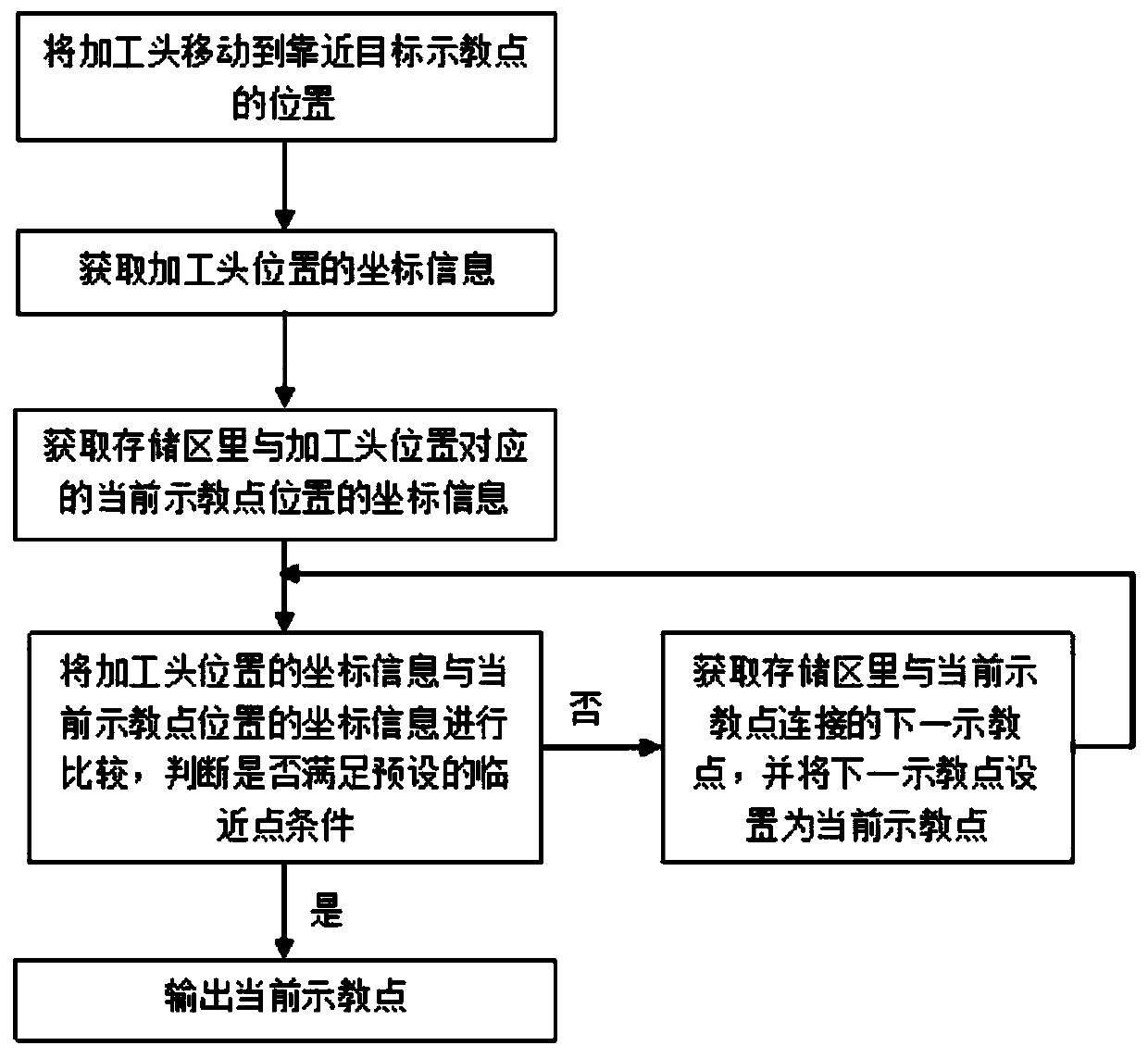
[0031] like figure 1 As shown, the embodiment of the present invention provides a method for capturing the target teaching point, including:
[0032] S01: Move the processing head to a position close to the target teaching point.
[0033] Wherein, the operating processing head is moved and positioned near the target teaching point.
[0034] S02: Obtain the coordinate information of the processing head position.
[0035] Wherein, the coordinate information of the position of the processing head can be spatial coordinate information, and the coordinate information of the current needle head can be extracted by software.
[0036] S03: Obtain the coordinate information of the current teaching point position corresponding t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More