

A Design Method of Attraction Law for Discrete Time Controller Using Disturbance Differential Compensation
A technology of discrete time and design method, applied in the general control system, adaptive control, control/regulation system, etc., can solve the problems that the controller cannot be realized, and the dynamic characteristics of the system error are not considered.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
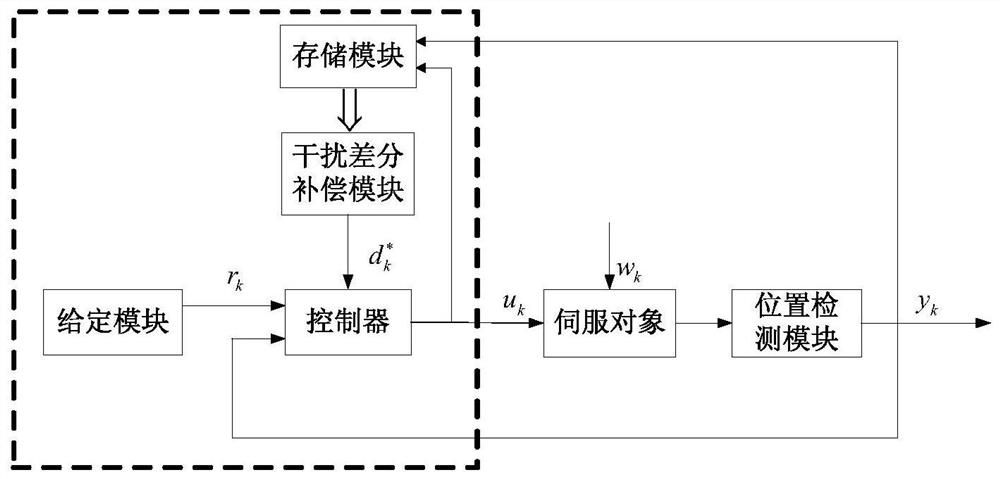
[0090] figure 1 Block diagram of the servo system. refer to figure 2 — Figure 49 , a method for designing an attractive law of a discrete-time controller using a disturbance differential suppression strategy, a discrete servo system that uses a differential compensation for disturbance and effectively suppressing interference, and a method for designing an attractive law of a discrete-time controller includes the following steps:
[0091] Step 1. Given a reference signal r k
[0092] given reference signal r k is a polynomial of time variable k, and M represents the highest power of the polynomial; the three reference signals are as follows:
[0093] 1) Square wave signal, M=0
[0094]
[0095] 2) Triangular wave signal, M=1
[0096]
[0097] 3) S curve, M=3
[0098]
[0099] Among them, A is the amplitude, and N is the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More