

Assistance external skeleton segment-type foot structure of lower limb
An exoskeleton, segmented technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor interaction comfort, non-compliant interaction, and inability to resist impact force, and achieve the effect of increasing comfort.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is described in further detail below in conjunction with accompanying drawing:
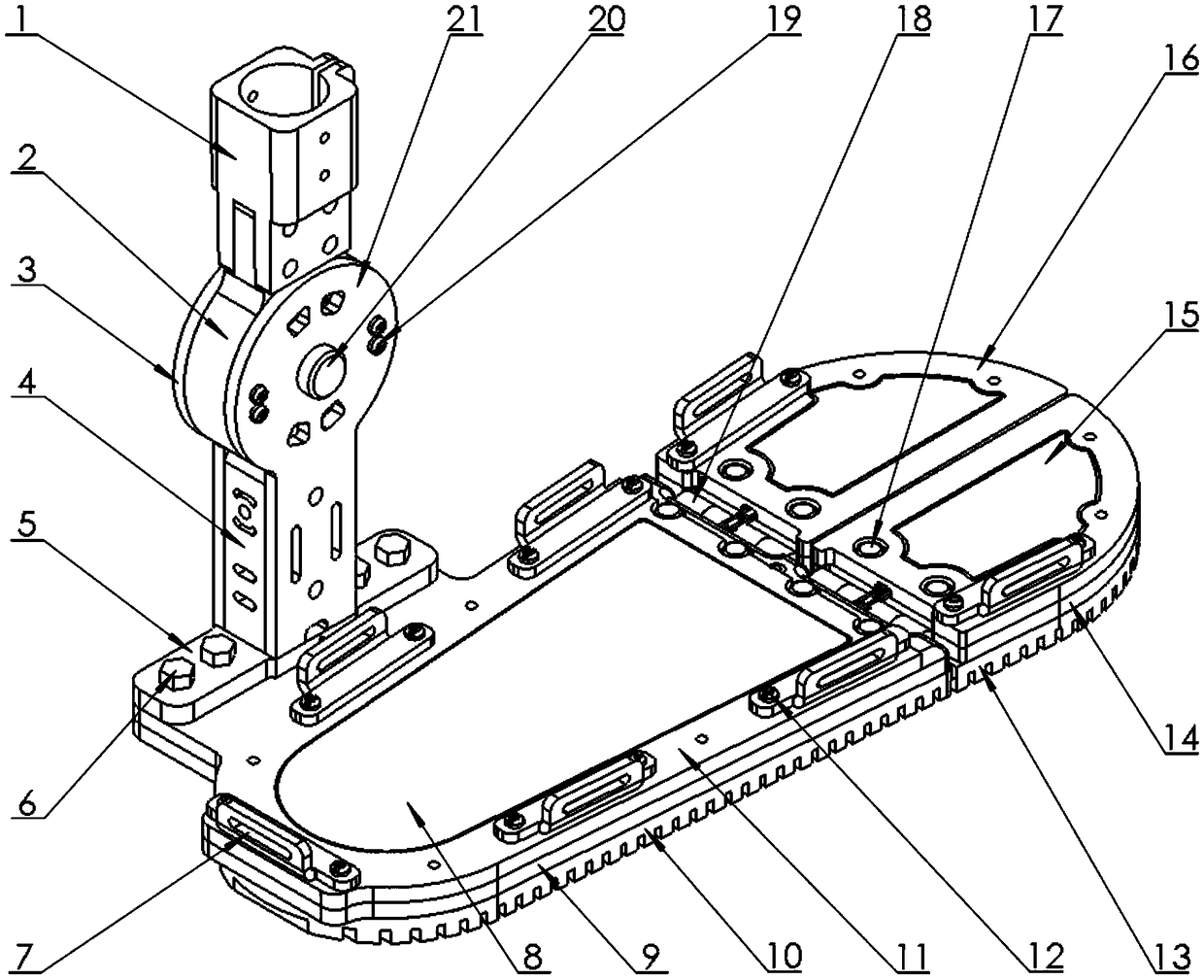
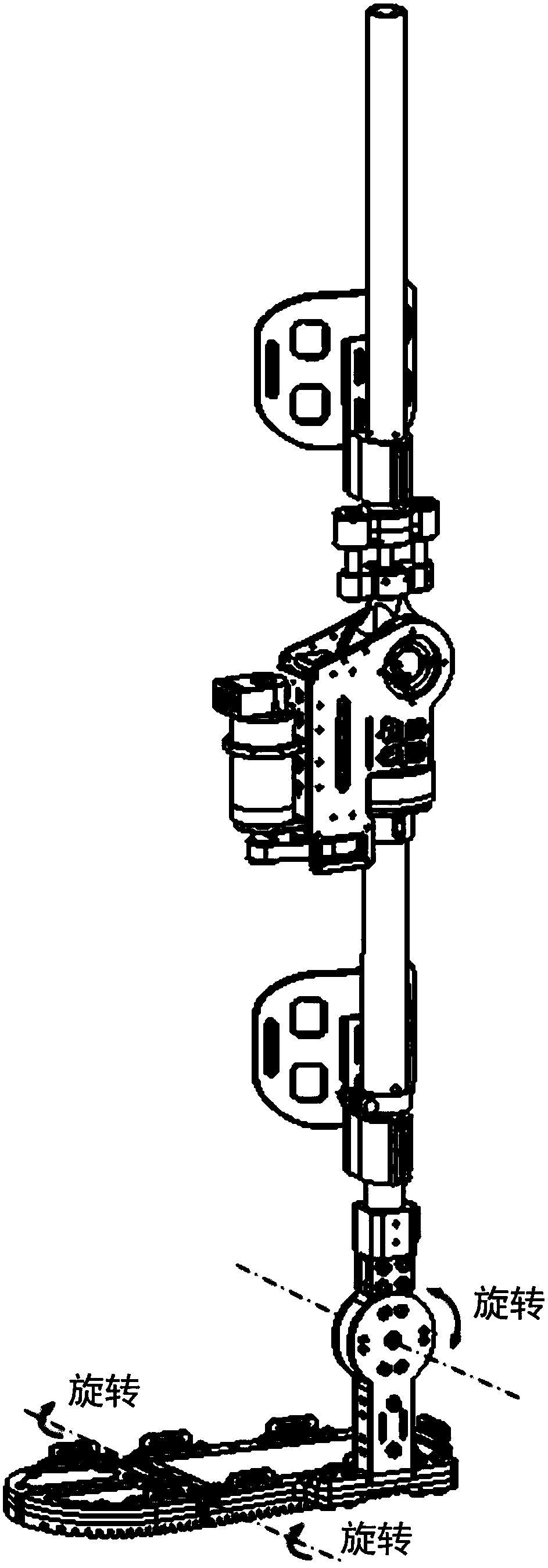
[0031] The present invention is a segmented foot structure of the lower limb power-assisted exoskeleton, which comprises a calf connection sleeve 1, an elastic torsion structure of the ankle joint and a layered plantar structure; the upper end of the calf connection sleeve 1 is connected to the calf part;
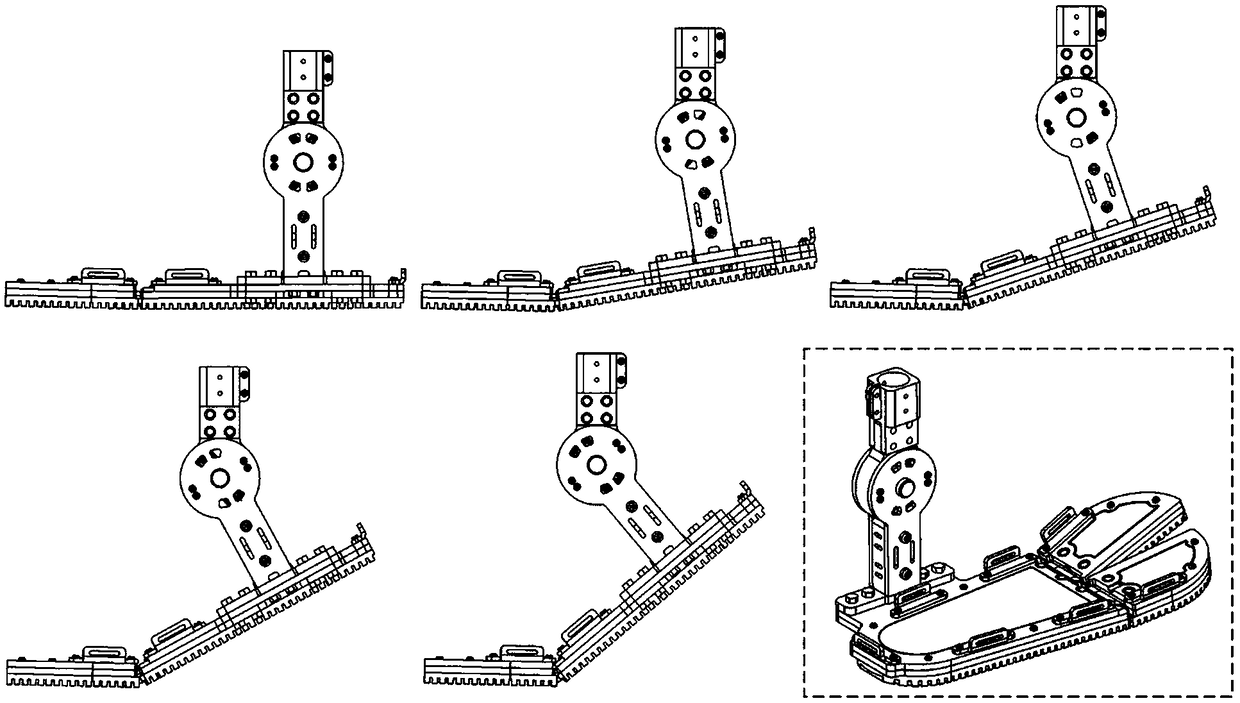
[0032] The elastic torsion structure of the ankle joint includes an ankle joint supporting structure block 4 and a disc-shaped torsion housing 2, the upper end of the disc-type torsion housing 2 is fixedly connected with the lower end of the lower leg connection sleeve 1; the upper end of the ankle joint support structure block 4 is provided with an arc groove, The lower end of the disc-type torsion housing 2 is provided with a rotating body that cooperates with the arc-shaped groove at the upper end of the ankle joint support structure block 4. The ankle joint suppo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More