

Crawling device for pruning robot
A technology of crawling devices and robots, which is applied in applications, electric pruning saws, agricultural machinery and implements, etc., can solve problems such as environmental damage, potential safety hazards, and large space requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0065] The present embodiment is an embodiment of a tree-climbing robot for debranching.
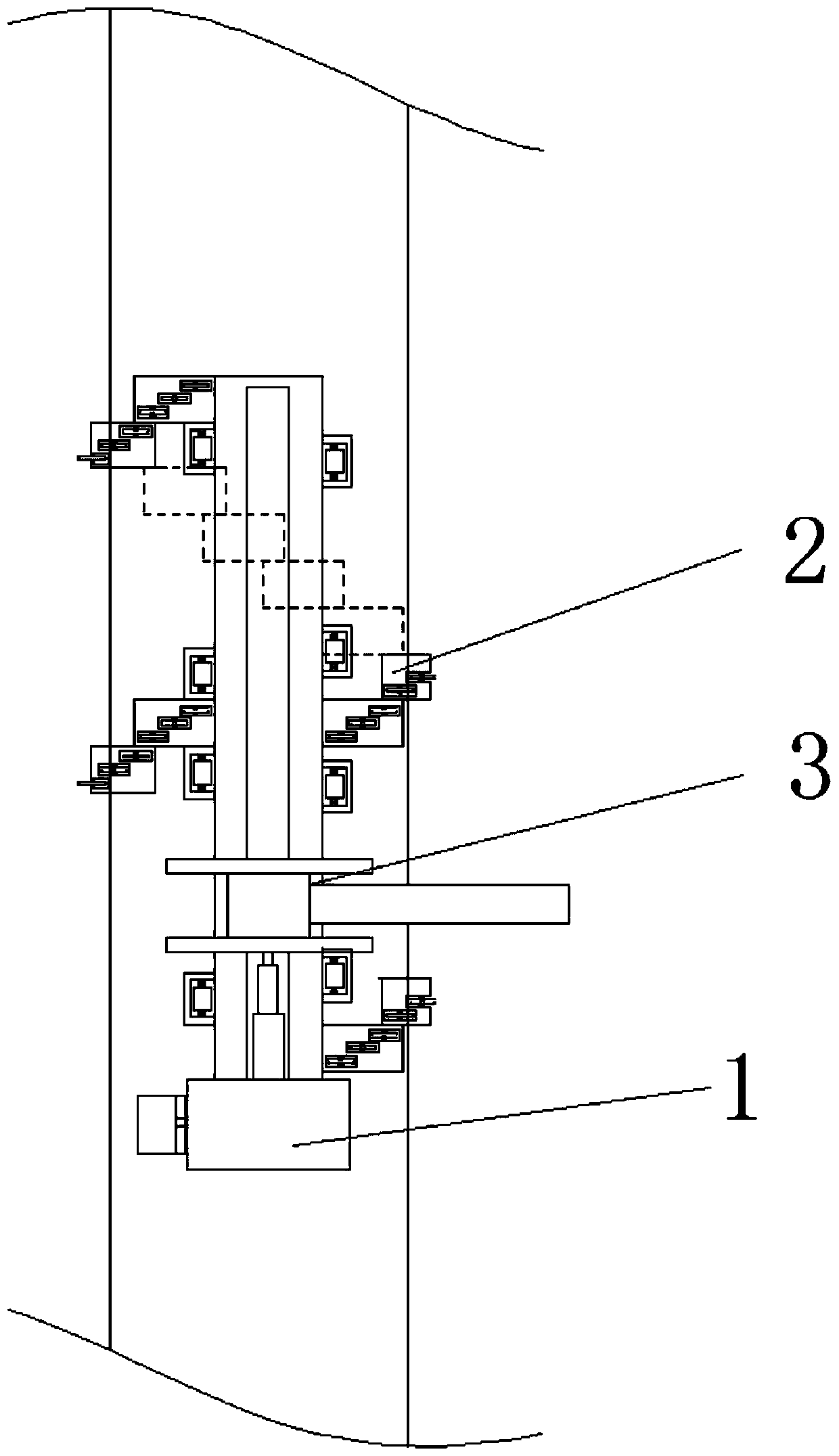
[0066] Such as figure 1 As shown, a tree-climbing robot for delimbing disclosed in this embodiment includes a power component 1, a crawling device 2 and a deforestation component 3; , the branching member 3 is arranged on the power member 1;
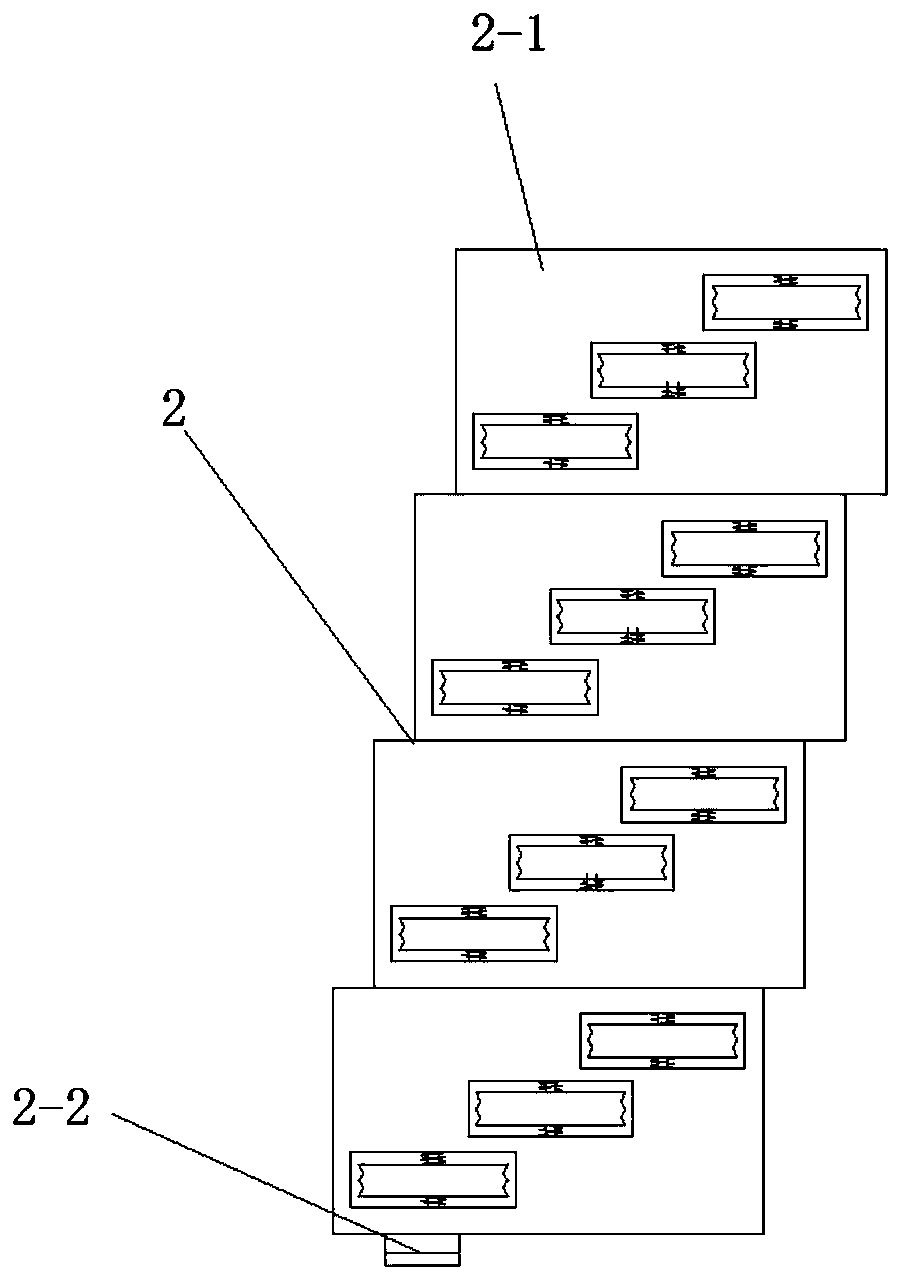
[0067] The crawling device 2 is movably connected with the power component 1. When the crawling device 2 is not installed, the overall shape is "parallelogram". From "parallelogram" to "serpentine", the "serpentine" crawling device 2 can fix the power component 1 on the trunk through its own shrinkage deformation, and the power component 1 can make the crawler 2 spiral up and down, In the process of spiral lifting, the power member 1 fully cooperates with the change of the outer diameter of the tree through the contraction and deformation of the crawler device 2, so as to keep the power member 1 stable. Can be deformed successively to pass throu...
specific Embodiment approach 2
[0071] This embodiment is an embodiment of a power component for a delimbing robot. It should be noted that the power component for a tree-climbing robot in this embodiment can be implemented separately, that is, it can exist alone as a part of a tree-climbing robot for tree-breaking, or it can be used for a tree-climbing robot described in Embodiment 1. Pruning was further defined with a tree-climbing robot.
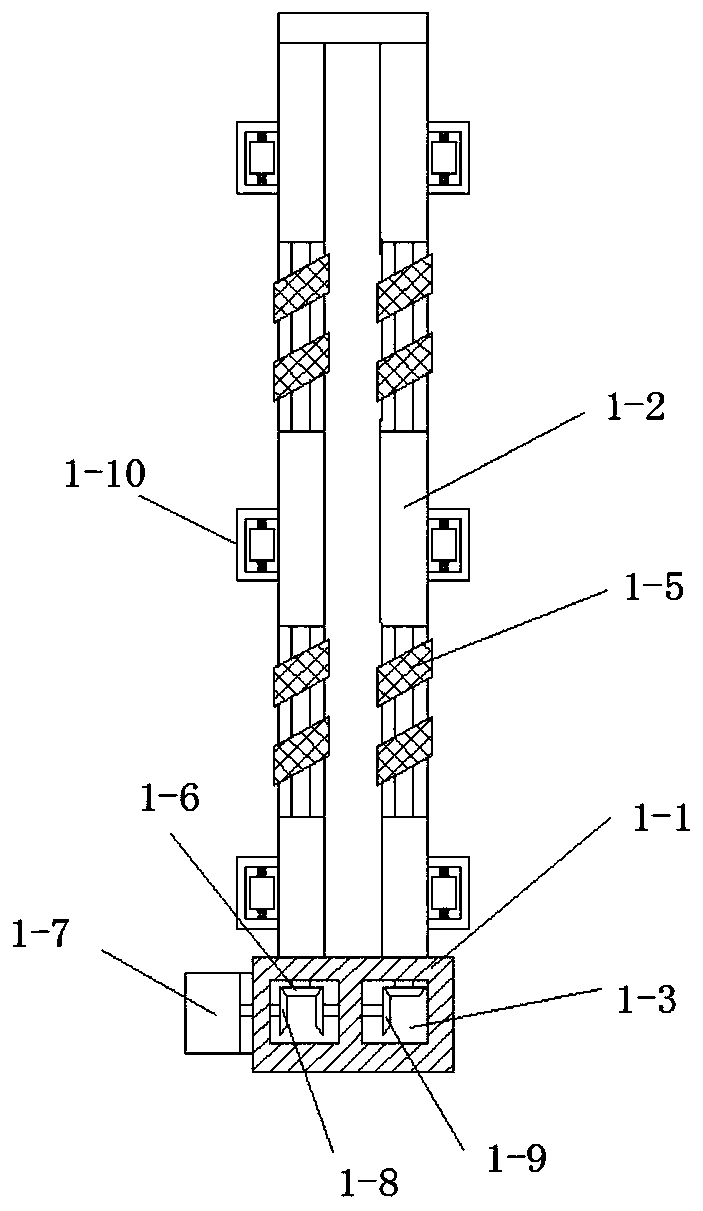
[0072] combine figure 1 , 2 , 5, and 6, a power member for a branching robot disclosed in this embodiment includes a power box 1-1, a vertical beam 1-2, an inclined roller 1-5, a transmission T-shaped gear 1-6, Motor 1-7, driving T-shaped gear 1-8 and connecting T-shaped gear 1-9; the power box 1-1 and the connecting plate are connected by parallel symmetrical vertical beams 1-2, and the power box 1- There are two transmission chambers 1-3 symmetrically opened in 1, two grooves are symmetrically opened on the side wall of the vertical beam 1-2, and a chute 1-4 is ope...
specific Embodiment approach 3
[0079] This embodiment is an embodiment of a delimbing component for a delimbing robot. It should be noted that the branching member for a branching robot of this embodiment can be implemented separately, that is, it can exist alone as a part of a branching tree-climbing robot for branching, or it can be used for a tree-climbing robot described in the first embodiment. Species tree-climbing robot for delimbing is further defined.
[0080] Such as figure 1 , 5 , 6, a branching member for a branching robot disclosed in this embodiment is characterized in that it includes a splint 3-1, a cross-shaped limiting plate 3-2, a branching saw 3-3 and an air cylinder 3-4 The splint 3-1 is parallel and symmetrically arranged, and the side wall of the splint 3-1 is provided with a cross-shaped limiting plate 3-2, and the cross-shaped limiting plate 3-2 is movably arranged on the vertical beam 1-2. In the chute 1-4, the branching saw 3-3 is arranged between two parallel splints 3-1, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More