

Pedestrian gait recognition method based on MEMS inertial sensor
An inertial sensor and gait recognition technology, applied in the field of personal navigation and positioning, can solve problems such as poor practicability, low recognition accuracy, and not so large differences, and achieve the effects of accurate judgment, high recognition accuracy, and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
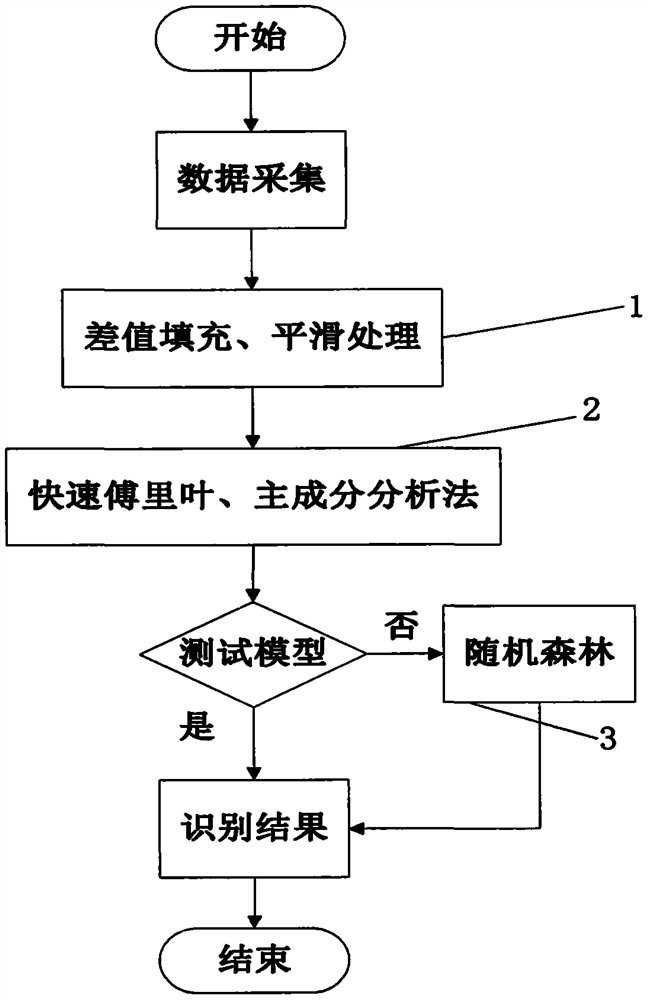
[0014] Such as figure 1 As shown, the indoor gait recognition method based on the MEMS inertial sensor includes filling the difference of the acceleration angular velocity and smoothing the filter. Carry out feature construction, and finally design the experimental model.
[0015] Due to the large difference in acceleration and angular velocity at different moments, the acceleration and angular velocity are selected as the original characteristic data. In order to be able to better identify and classify, it is necessary to perform feature processing on the data. The normal adult's pace is 1.5m / s, so it can be considered that a complete step can be taken within 1 second. Therefore, add a window of 1 second, and then perform fast Fourier transform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More