Old pipeline inspection robot based on telescopic wheel train
A technology for inspection robots and pipelines, which is applied in the field of inspection robots, can solve problems such as water, bricks and other sundries in pipelines, complex pipeline environments, etc., and achieve high work efficiency, good universality, and good adaptability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
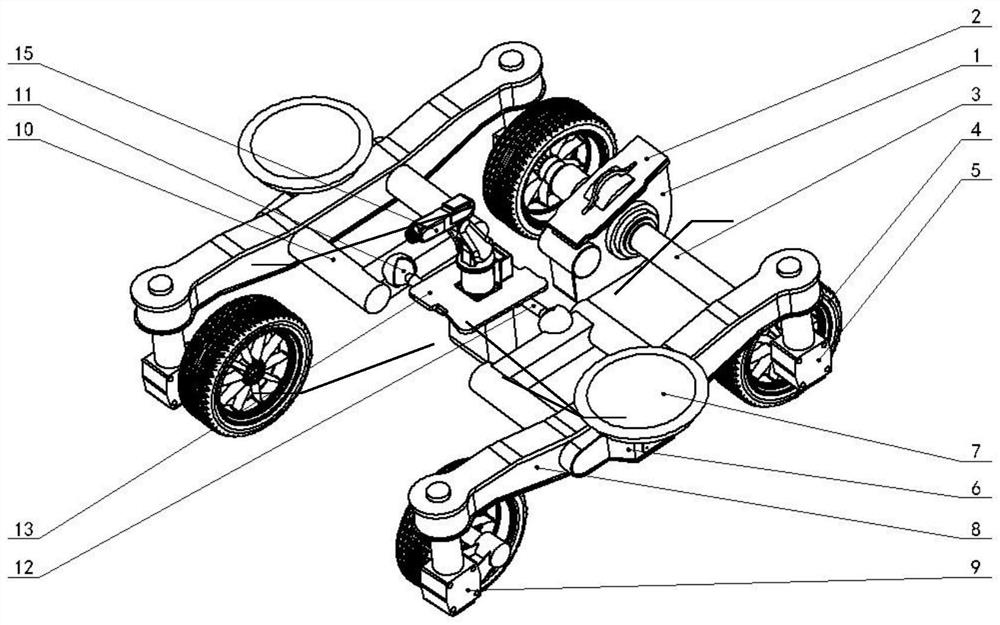
[0038] Such as figure 1 As shown, the present invention includes two front wheel assemblies, a rear wheel assembly, a front and rear wheel connection assembly, a steering mechanism and a camera module;
[0039] The two front wheel assemblies are respectively connected to the rear wheel assembly through the corresponding front and rear wheel assembly, a steering mechanism is arranged between the front wheel assembly and the rear wheel assembly, and the two sides of the steering mechanism are respectively connected with the two front and rear wheel connection assemblies. A camera module is installed on it; the rear wheel assembly is used to provide the forward power of the inspection robot, and the front and rear wheel connection assemblies are used for shock absorption, so that the entire body can achieve the effect of shock absorption. The steering mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More