

Clamping equipment and method
A technology of clamping equipment and jaws, which is applied in the field of clamping equipment, can solve the problems of affecting the deflection of shaft parts, affecting the machining accuracy and error of products, and contact asynchrony, so as to ensure the centering accuracy and improve the clamping The effect of precision and stable clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
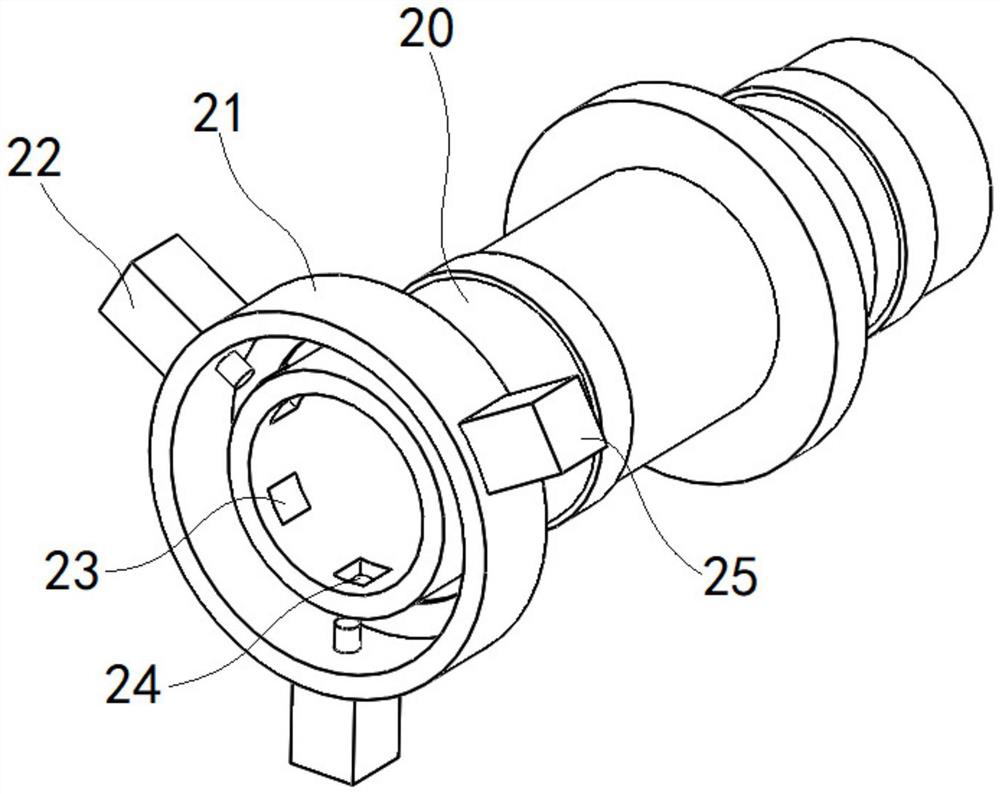
[0043] figure 1 shows a three-dimensional structural schematic diagram of a clamping device according to an embodiment of the present invention, in figure 1 In the shown structure, only the results of a group of auxiliary modules are shown, and other auxiliary modules are not shown in the illustrated structure in order to ensure the clarity of the drawing.
[0044] Correspondingly, the present invention provides a clamping device, including a three-jaw chuck modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More