

Pipe walking robot and control method thereof
A walking robot, control method technology, applied in chemical instruments and methods, cleaning methods and utensils, special pipes, etc. The effect of practicality and wide application, reliable operation and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
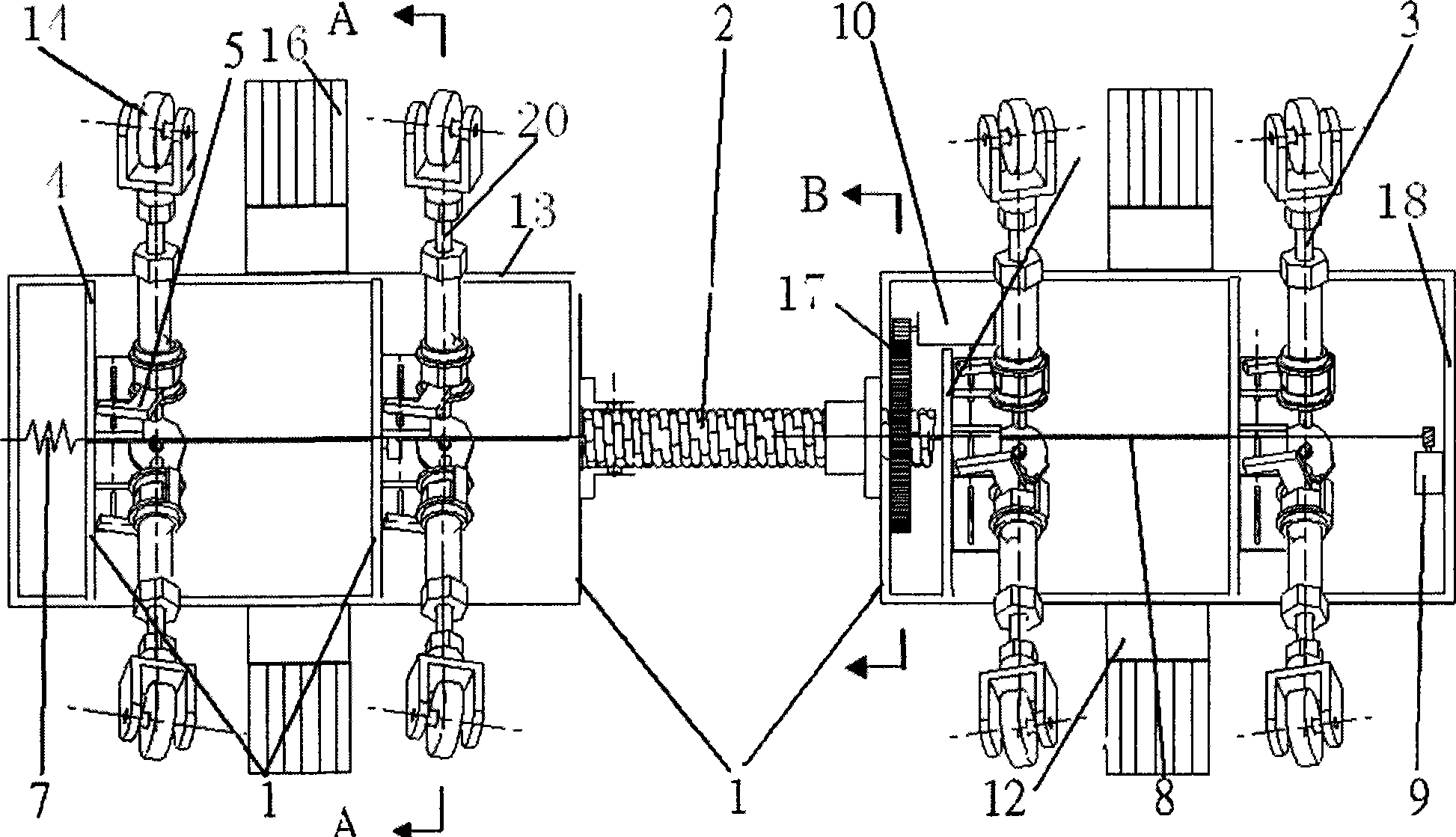
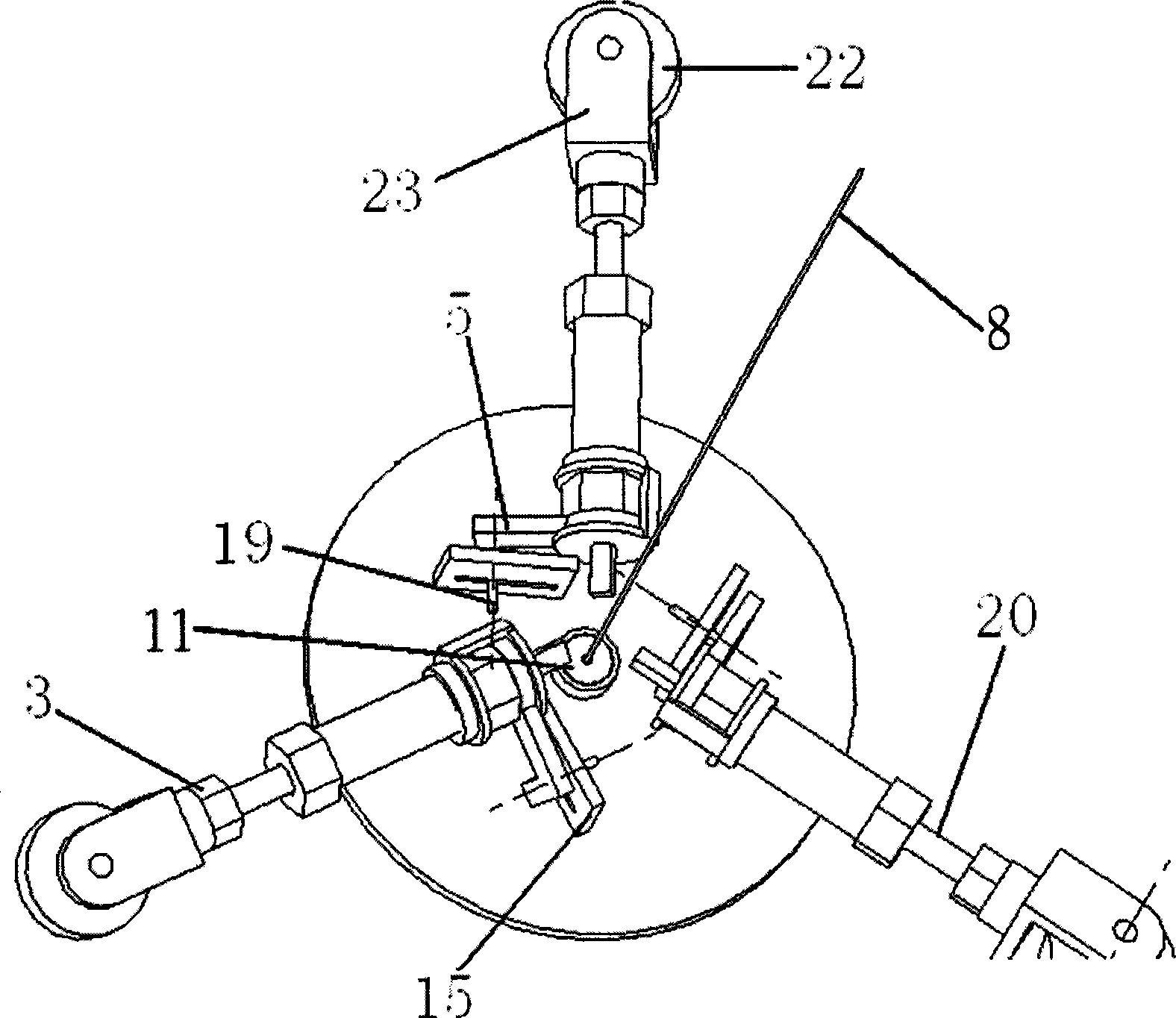
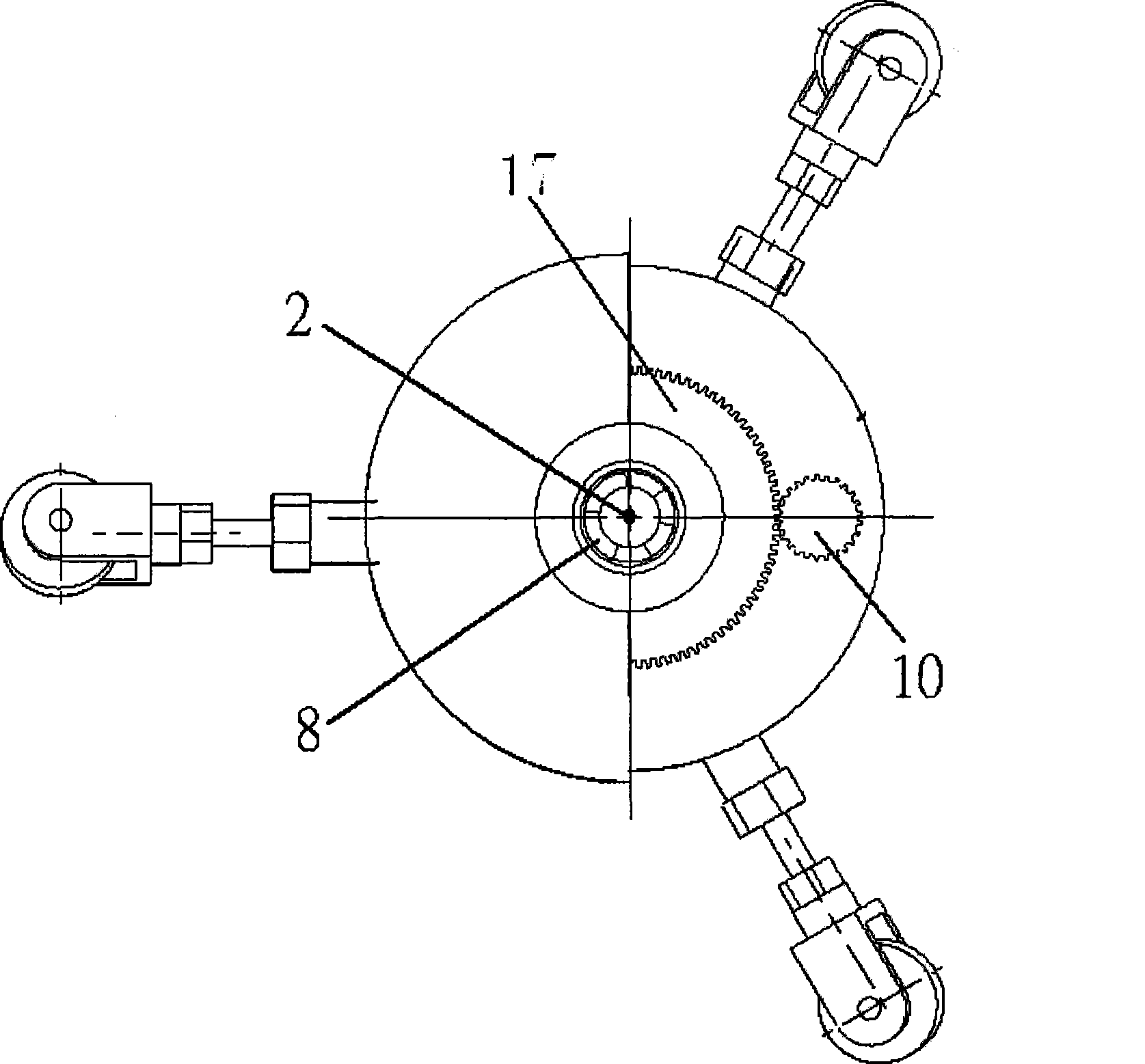
[0030] Below with reference to the accompanying drawings, through the description of the embodiments, the specific embodiments of the present invention, such as the shape, structure, mutual position and connection relationship between the various parts, the role and working principle of the various parts, etc., will be further described. Detailed instructions:
[0031] Such as figure 1 — Figure 5 As shown, the present invention is a pipeline walking robot, and the robot includes a connecting shaft 2, a supporting leg 3, a dial 4, a finger 5, a connecting rope 8, a variable pitch motor 9, a driving motor 10, and a cleaning device 12, The body shell 13, the roller device 14, the connecting rope 8 passes through the dial 4, and is connected with the variable pitch motor 9 fixed inside the body shell 13, and is set as more than one telescopic rotating support leg 3 and the dial 4 connected, the drive motor 10 is connected to the other body shell end 18 through the gear plate 17...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More