

Tracking control method of plane paths of self-managing airship
A technology of path tracking and control methods, applied in the direction of two-dimensional position/channel control, etc., can solve problems such as control failure and failure to guarantee system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] Below in conjunction with accompanying drawing, each part design method in the present invention is further described:
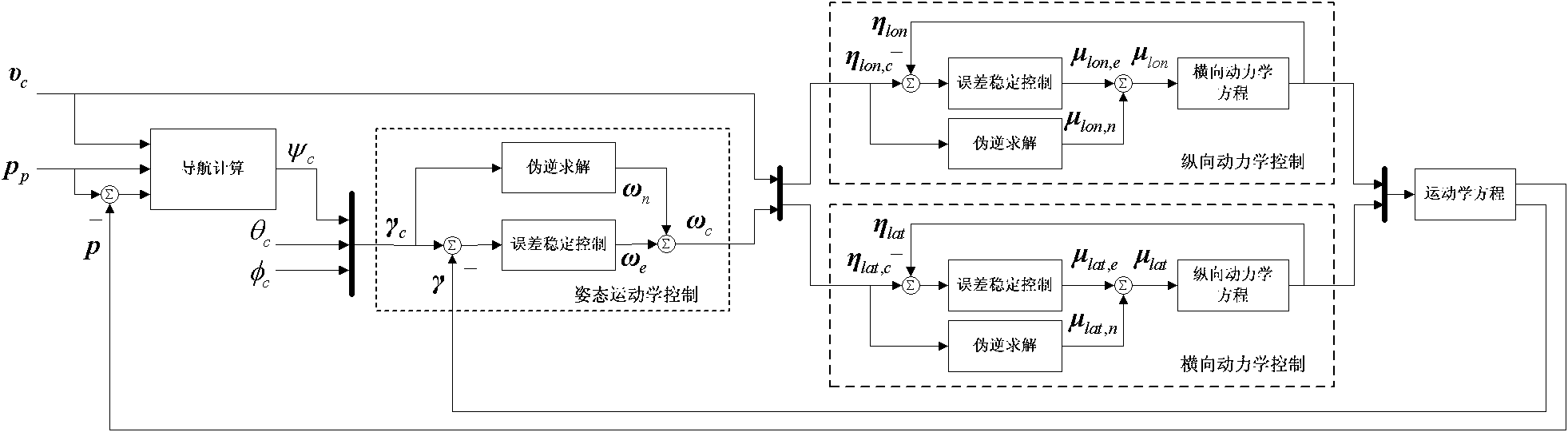
[0101] "A Method for Tracking and Controlling the Plane Path of an Autonomous Airship" of the present invention, see figure 1 As shown, the specific steps are as follows:
[0102] Step 1: Given expected tracking value
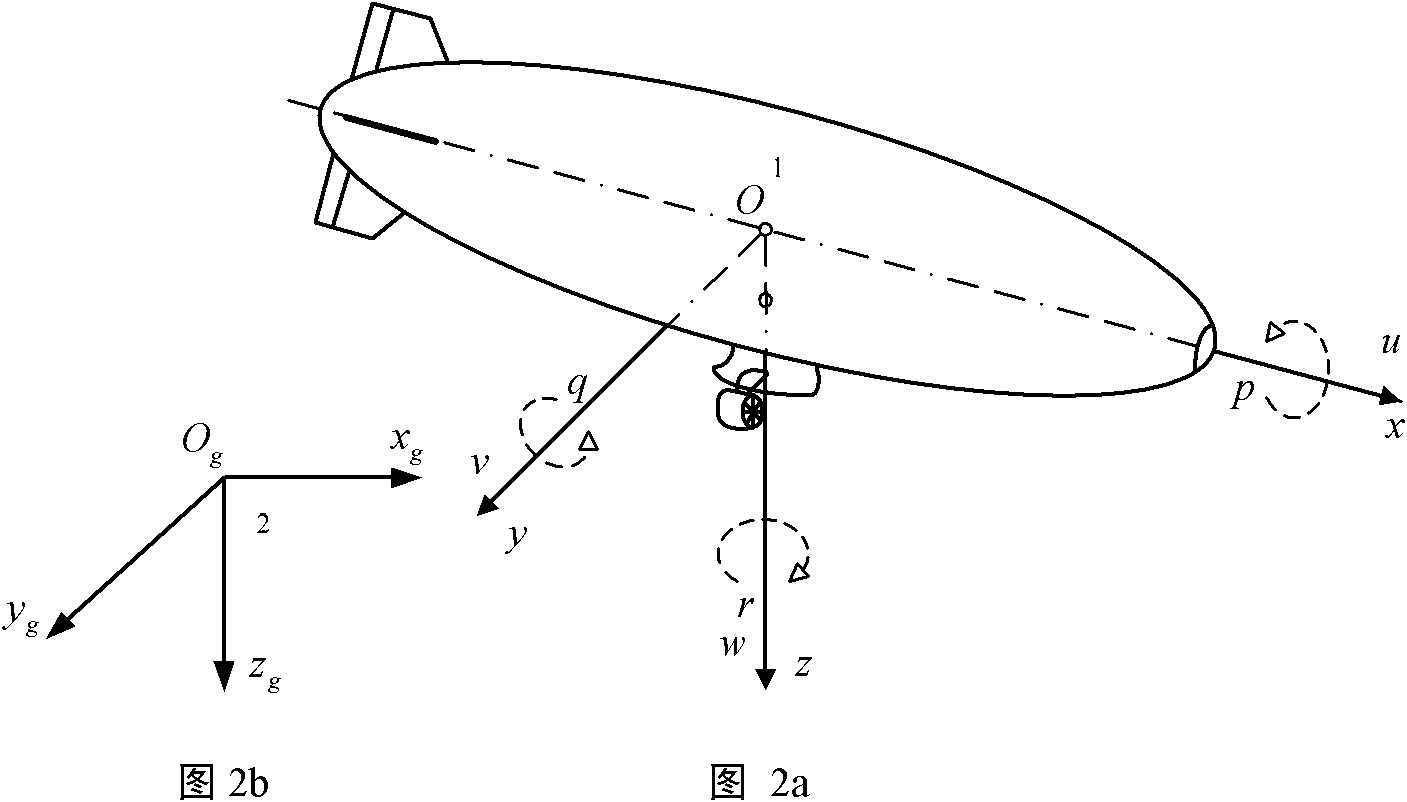
[0103] 1) if Figure 2a and Figure 2b As shown, the hull coordinate system Oxyz is established with the center of buoyancy of the autonomous airship as the origin; the inertial coordinate system O is established with any point on the ground as the origin g x g the y g z g , where the origin O g is any point on the ground, O g x g pointing north, O g the y g Pointing East, O g z g point to the center of the earth.
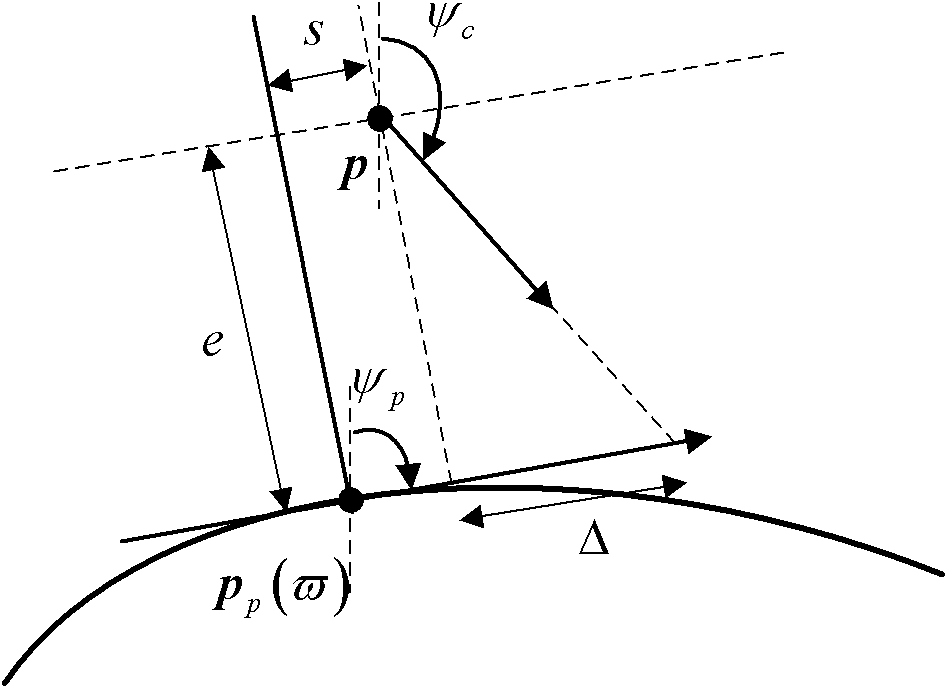
[0104] 2) Given the desired plane path in is the path parameter, x p ,y p Desired plane position for the airship.
[0105] 3) Given the desired pitch angle θ c , desired roll angle φ c are all zero.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More