

Three-axis hybrid-driven mechanical arm
A hybrid drive, robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex mechanism, clumsy action, low transmission efficiency, etc., and achieve the effect of high transmission efficiency, dexterous action, and smooth movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
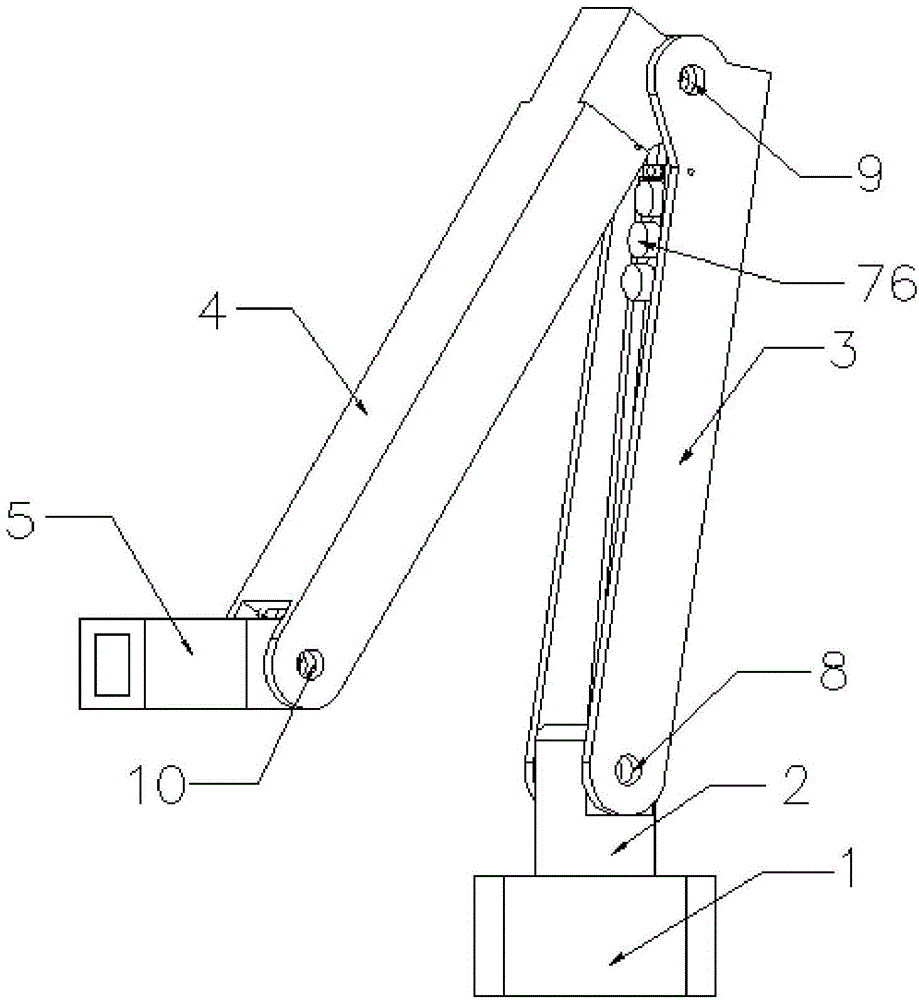
[0020] Refer to the attached figure 1 -5 further illustrate the present invention:
[0021] The three-axis hybrid drive mechanical arm of the present invention includes a base 1, a support 2, a rear arm 3, a forearm 4, and a palm 5, and is characterized in that the support 2 is hinged around the vertically upward first axis On the base 1, the lower end of the rear arm 3 is hinged on the support 2 around the second horizontal axis 8, and the upper end of the front arm 4 is hinged on the rear arm 3 around the third axis 9 , the lower end of the forearm 4 is hinged to the palm 5 around the fourth axis 10, and the second axis 8, the third axis 9, and the fourth axis 10 are parallel to each other;
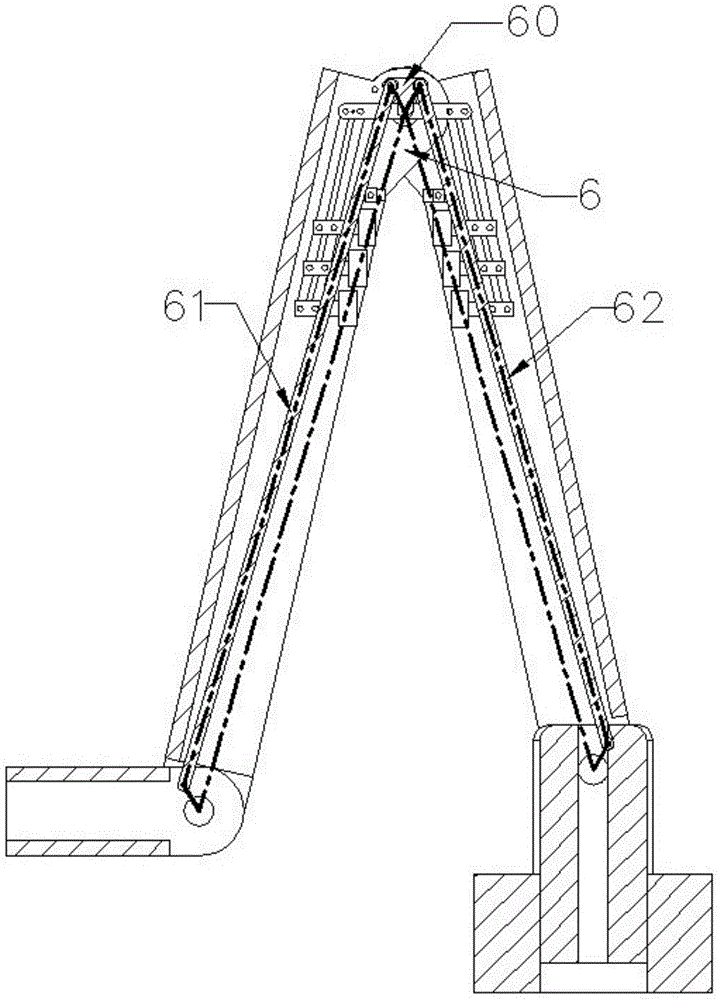
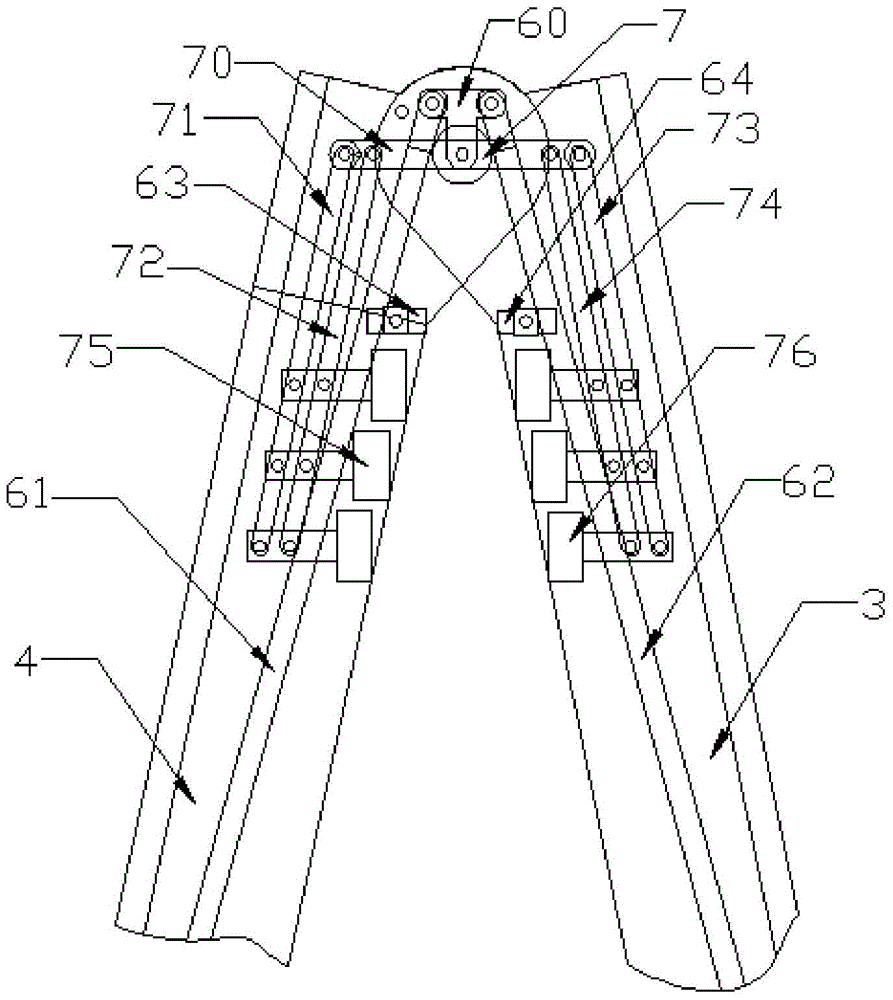
[0022] The palm 5 is connected to the first link mechanism, and the first link mechanism 6 includes a first intermediate link 60 whose middle part is hinged on the third shaft 9, a forearm link 61 extending in the forearm 4, and a forearm link 61 extending in the forearm 4. The rear a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More