

A light object handling manipulator
A technology for manipulators and objects, applied in the field of manipulators, can solve problems such as cost waste, and achieve the effects of low manufacturing cost, easy installation and fixation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
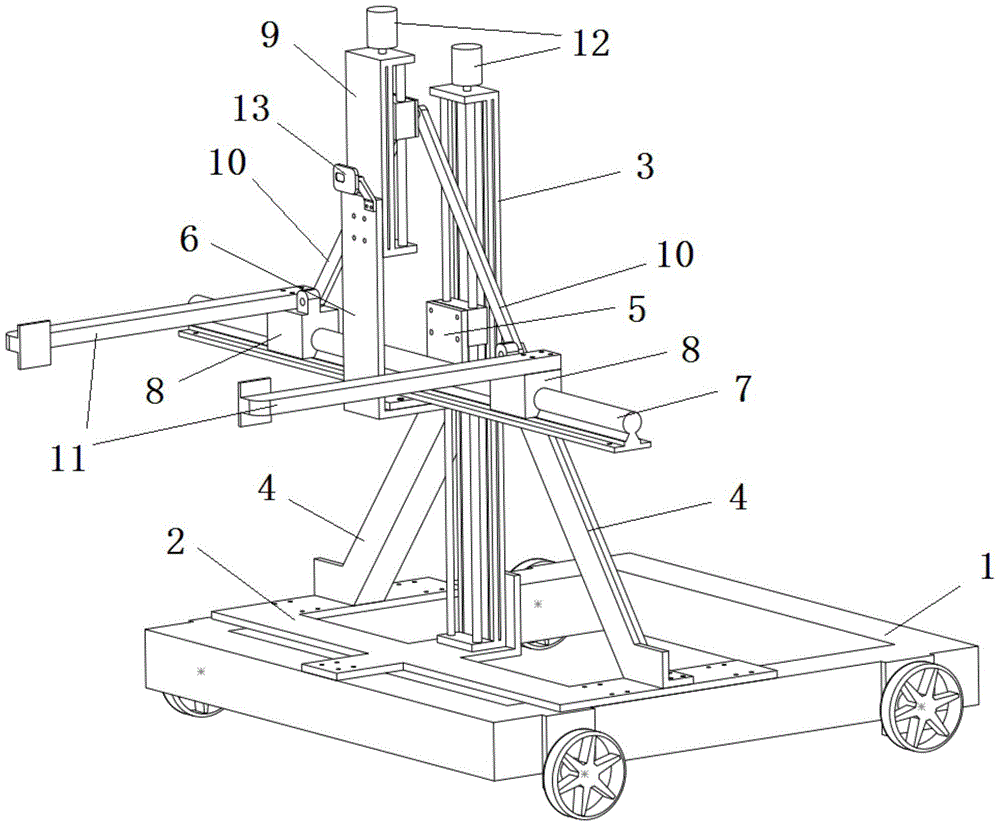
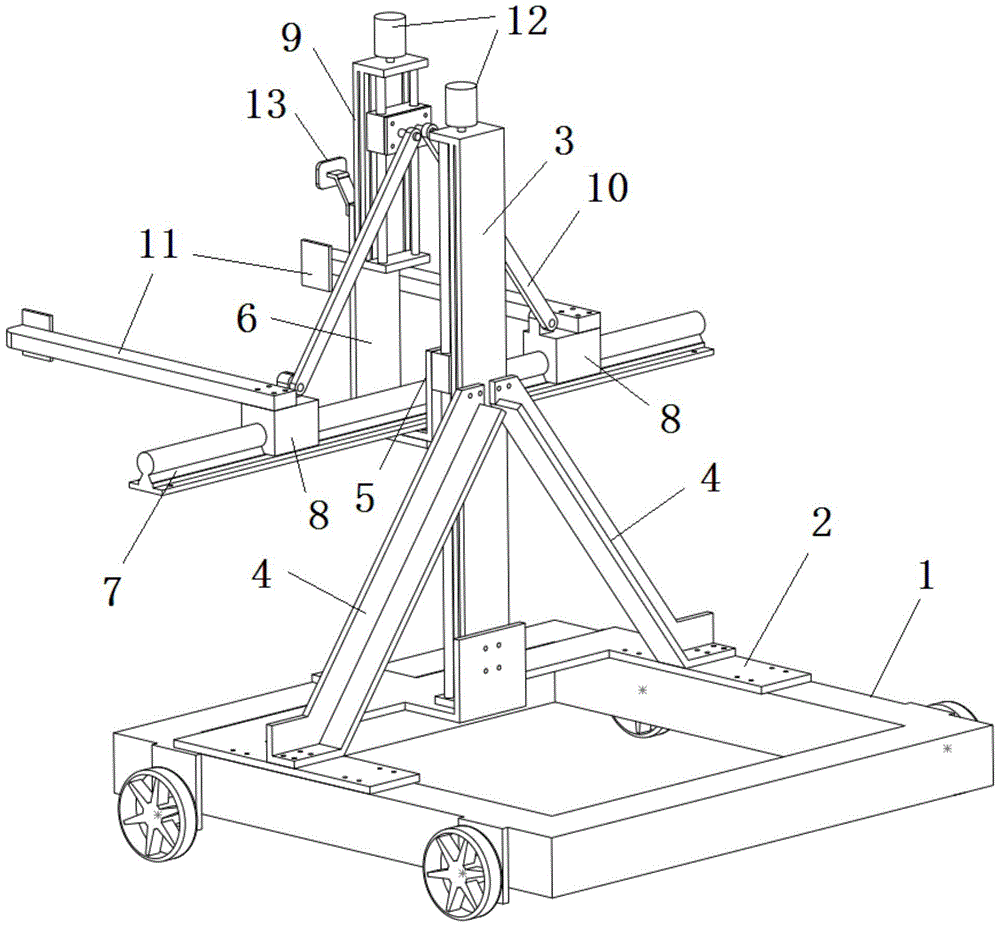
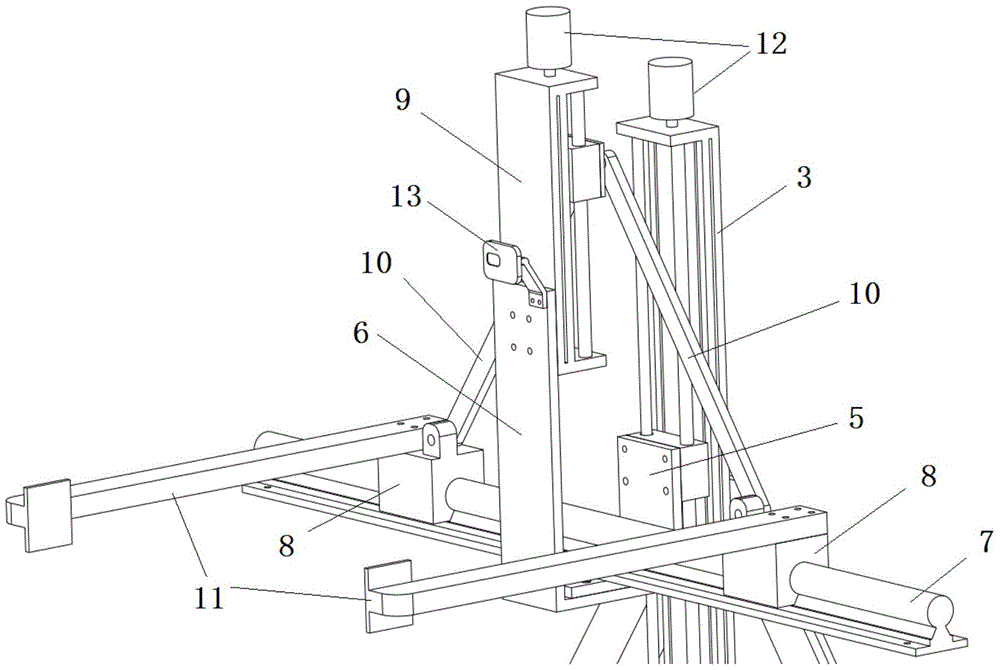
[0018] Such as Figure 1 ~ Figure 3 As shown, the present invention provides a light-duty object handling manipulator, which includes a wheeled chassis 1, a support base 2, a first ball screw slide 3, two fixing plates 4, a main pallet 5, a Auxiliary pallet 6, a cylindrical linear guide 7, two horizontal sliders 8, a second ball screw slide 9, two connecting rods 10 and two clamping arms 11.
[0019] A support base 2 is fixedly arranged on the wheeled chassis vehicle 1, and the entire manipulator structure is supported by the support base 2; a first ball screw slide table 3 is fixedly installed on the support base 2, and both sides of the first ball screw slide table 3 A fixed plate 4 is respectively connected to the support base 2 to strengthen the connection strength between the support base 2 and the first ball screw slide 3, so as to prevent the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More