

A two-wheeled self-balance robot self-adaptive sliding mode changing structure control method and system
A sliding mode variable structure and variable structure control technology, which is applied in adaptive control, general control system, control/regulation system, etc., can solve the problem of ignoring energy changes, cannot automatically detect whether the load is added or not, and cannot adapt to external Problems such as large-scale load in the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
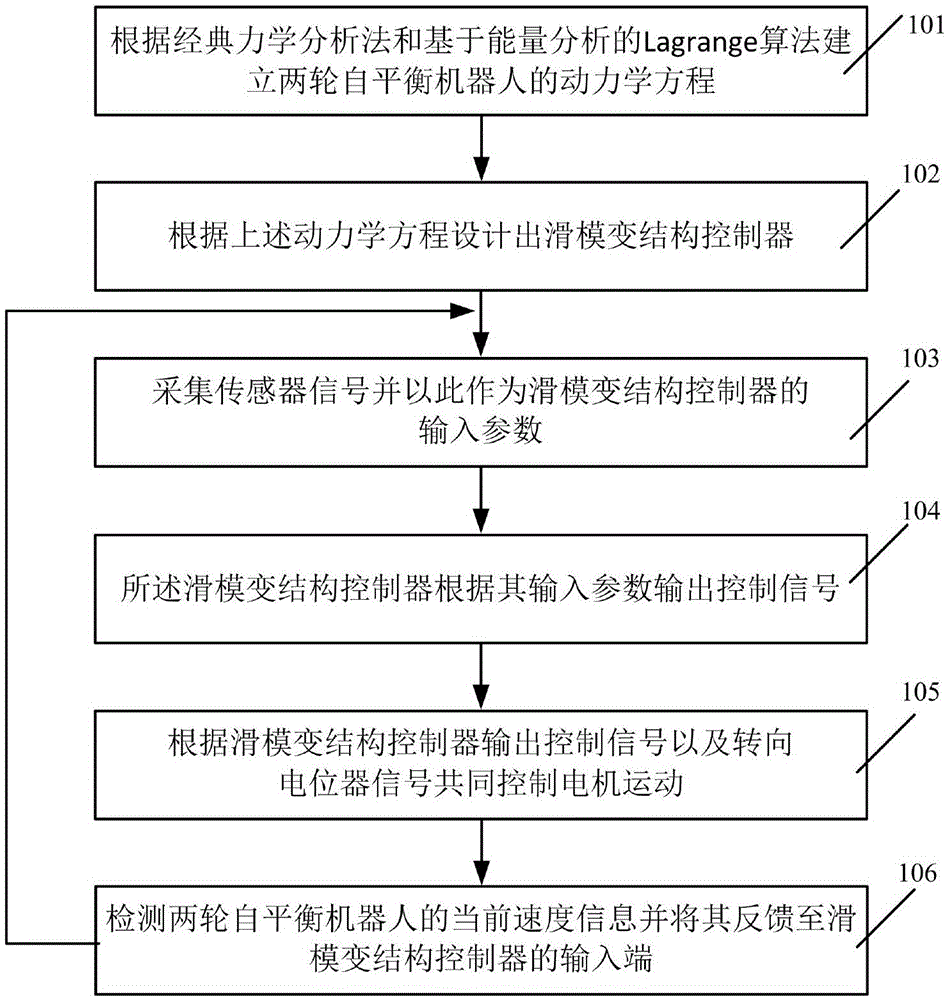
[0073] see figure 1 , is shown as a flow chart of a two-wheeled self-balancing robot adaptive sliding mode variable structure control method of the present invention, comprising the following steps:
[0074] Step 101: Model the following dynamic equations of the two-wheeled self-balancing robot according to the classical mechanical analysis method and the Lagrange algorithm based on energy analysis:
[0075] { θ ·· = a 1 θ + b 1 U + c 1 e v + d ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More