

Six-degree-of-freedom parallel dynamic platform
A dynamic platform and degree of freedom technology, applied in instruments, simulators, space navigation equipment, etc., can solve the problems of raising the center of gravity of the motion mechanism, unstable motion of the mechanism, and high cost of the hydraulic system, so as to improve the motion speed and acceleration, improve the The effect of motion accuracy and improved service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
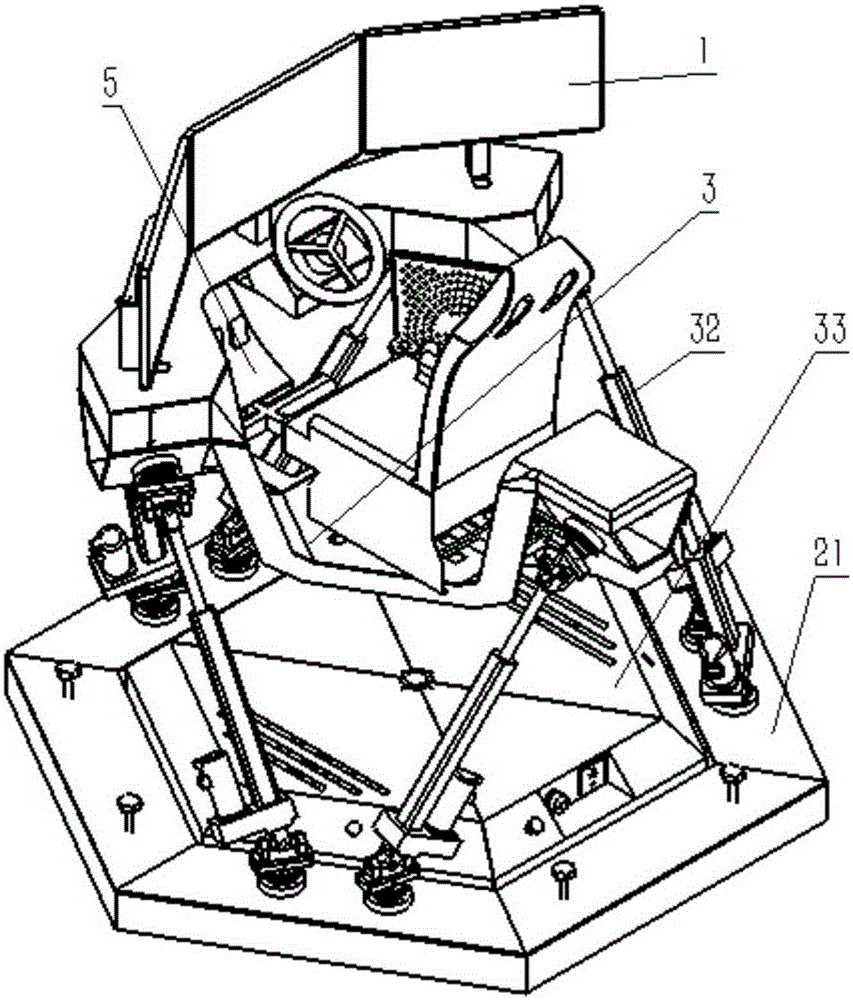
[0040] The overall structure of the present invention is as Figure 1 to Figure 9 shown.
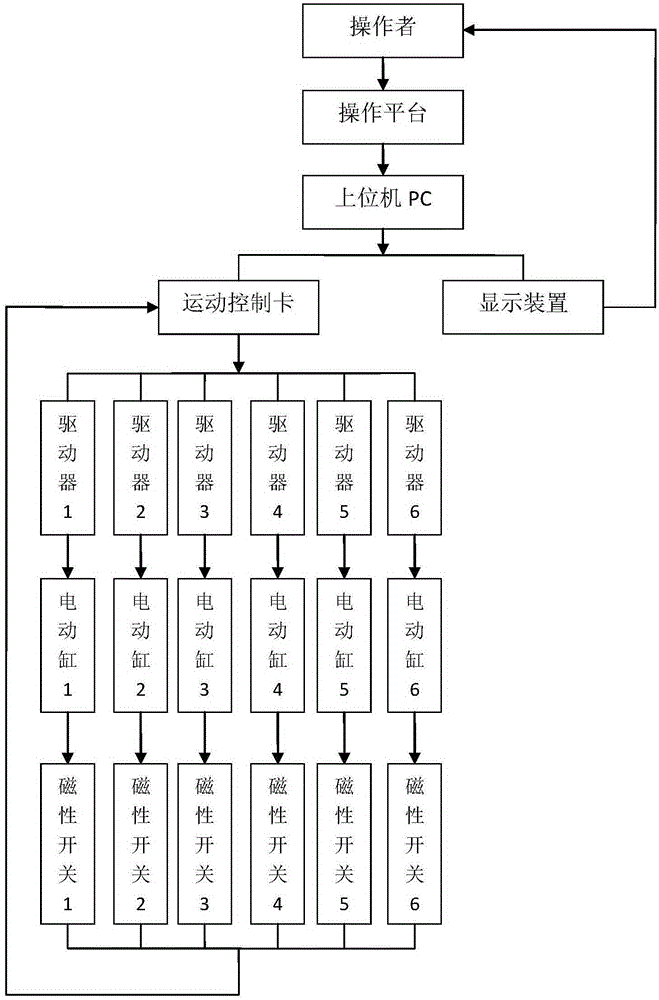
[0041] A six-degree-of-freedom parallel dynamic platform, which consists of six parts: a display device 1, an operating platform 5, an upper platform 3, an actuator 32, a lower platform 21, and a control system 33; the position connection relationship between them is: the display device 1 The operating platform 5 is placed on the upper platform 3 respectively; the two ends of the actuator 32 are respectively fixed on the upper platform 3 and the lower platform 21 ; the control system 33 is located in the lower platform 21 .
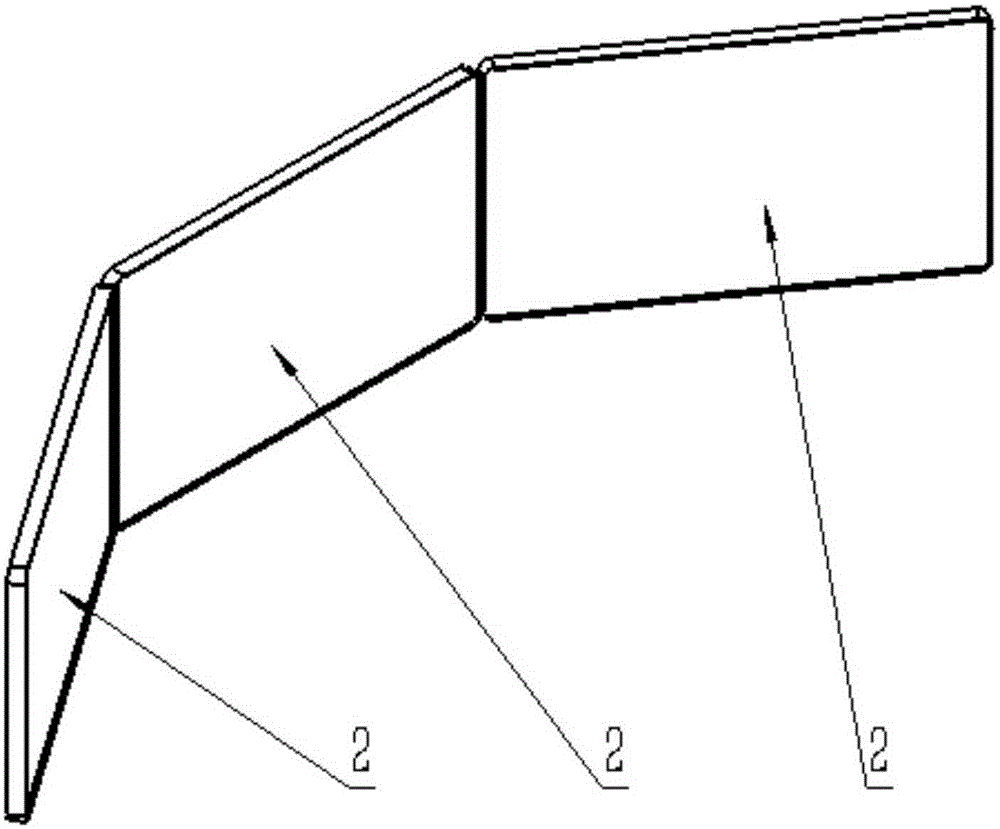
[0042]The display device 1 is composed of three ultra-narrow frame 27-inch displays 2, and the three display screens are fixed on the display bracket 4 of the upper platform 3 by screws; The gear position 9 is composed of four par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More