

Hand-eye coordination type positioning device and method for forcible entry robot
A robot hand and positioning device technology, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the positioning of demolition robots, and achieve the effect of solving the problem of inaccurate operation points and slow movements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the embodiments of the present invention. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
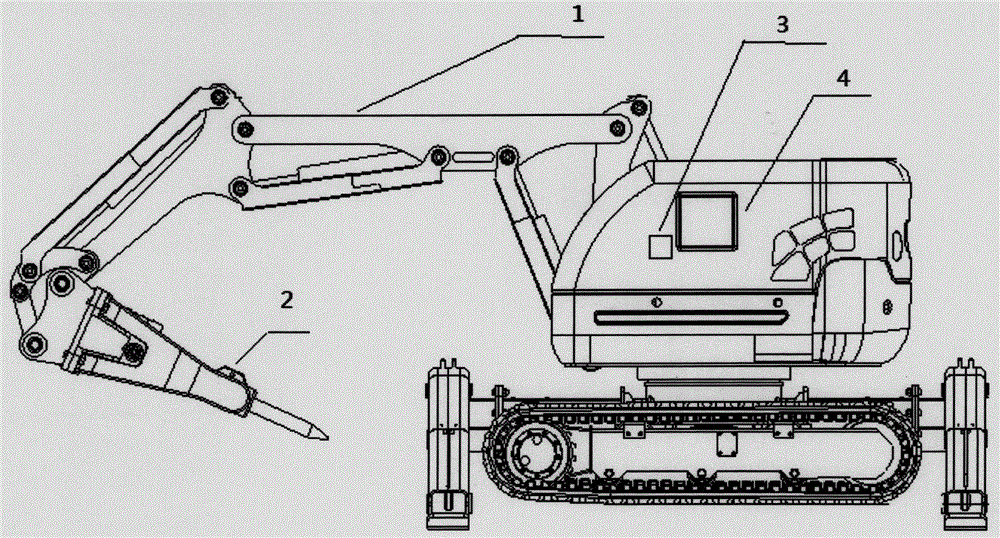
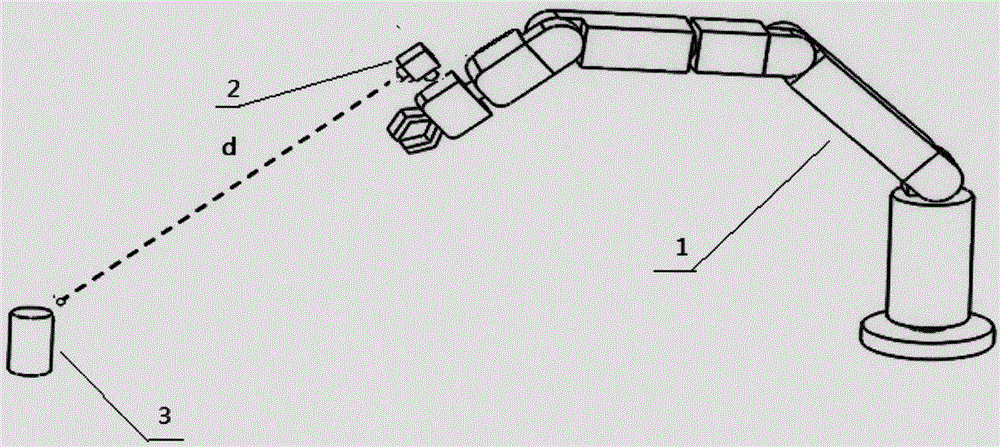
[0030] see Figure 1~2 , in an embodiment of the present invention, a hand-eye coordination positioning device for a demolition robot is composed of a multi-joint hydraulically driven mechanical arm 1, a laser ranging sensor 2, a CAN bus controller 3, and a vehicle-mounted computer 4; the laser ranging sensor 2 is installed on On the end effector of the multi-joint hydraulically driven mechanical arm 1, the laser emission method is consistent with the direction of a certain c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More