

Uniaxial modulation laser gyroscope inertial navigation system multi-coordinate system calibration method
An inertial navigation system and modulated laser technology, which is applied in the field of multi-coordinate system calibration of a single-axis modulated laser gyro inertial navigation system, and can solve problems such as difficulty in calibration, affecting the normal use of equipment, and failure of inertial devices to resume work in time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings.
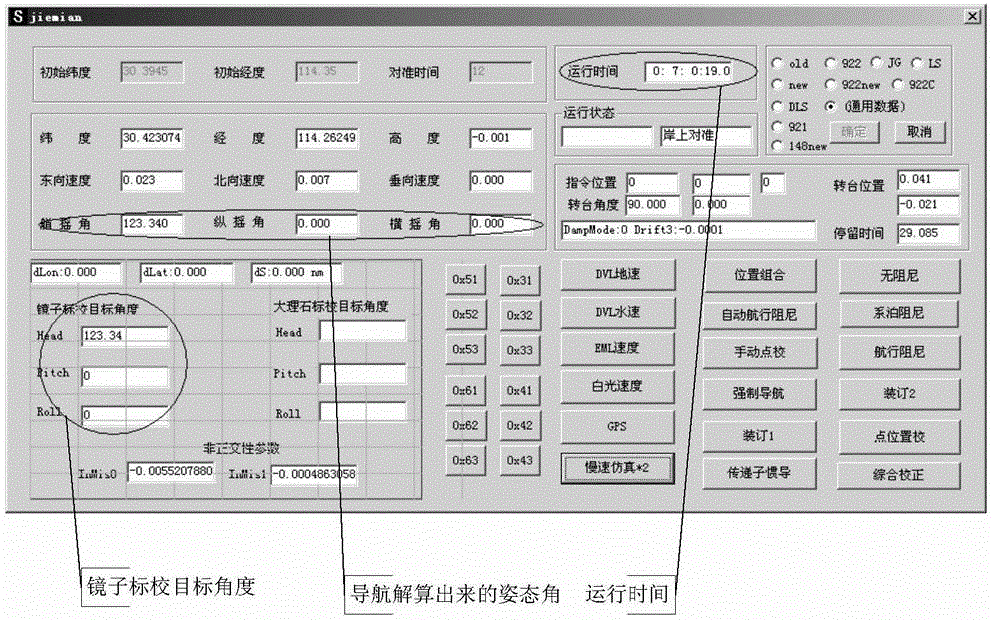
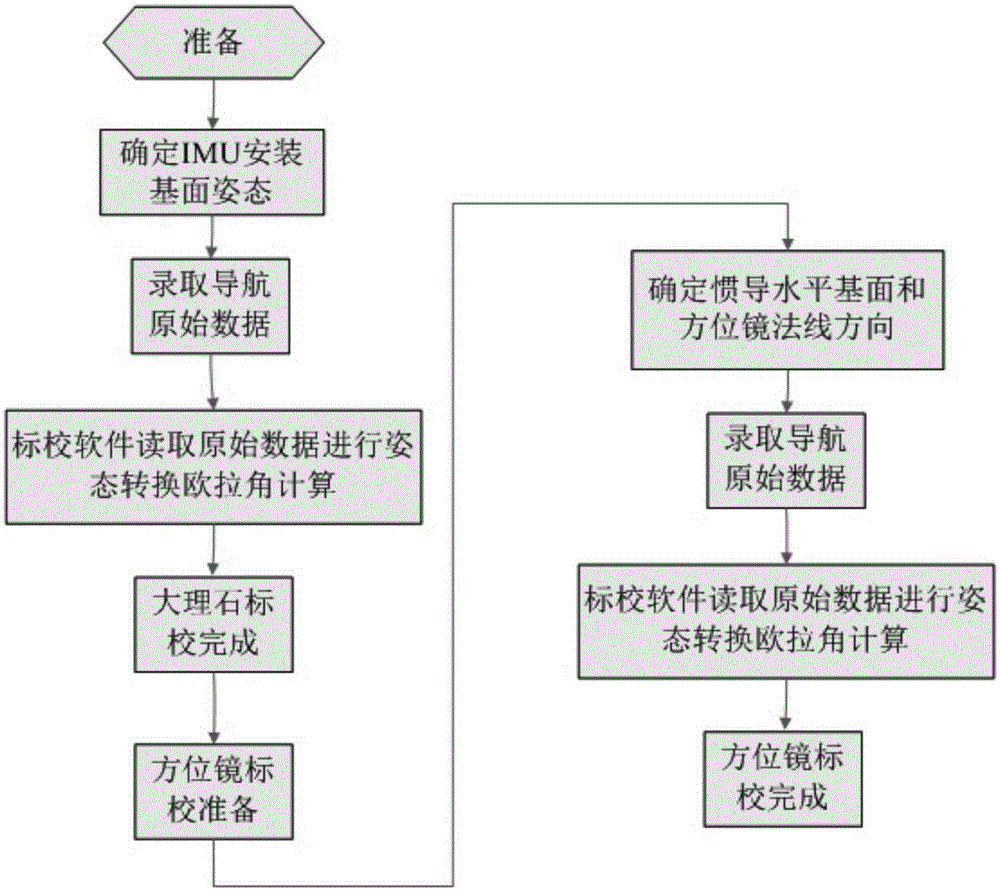
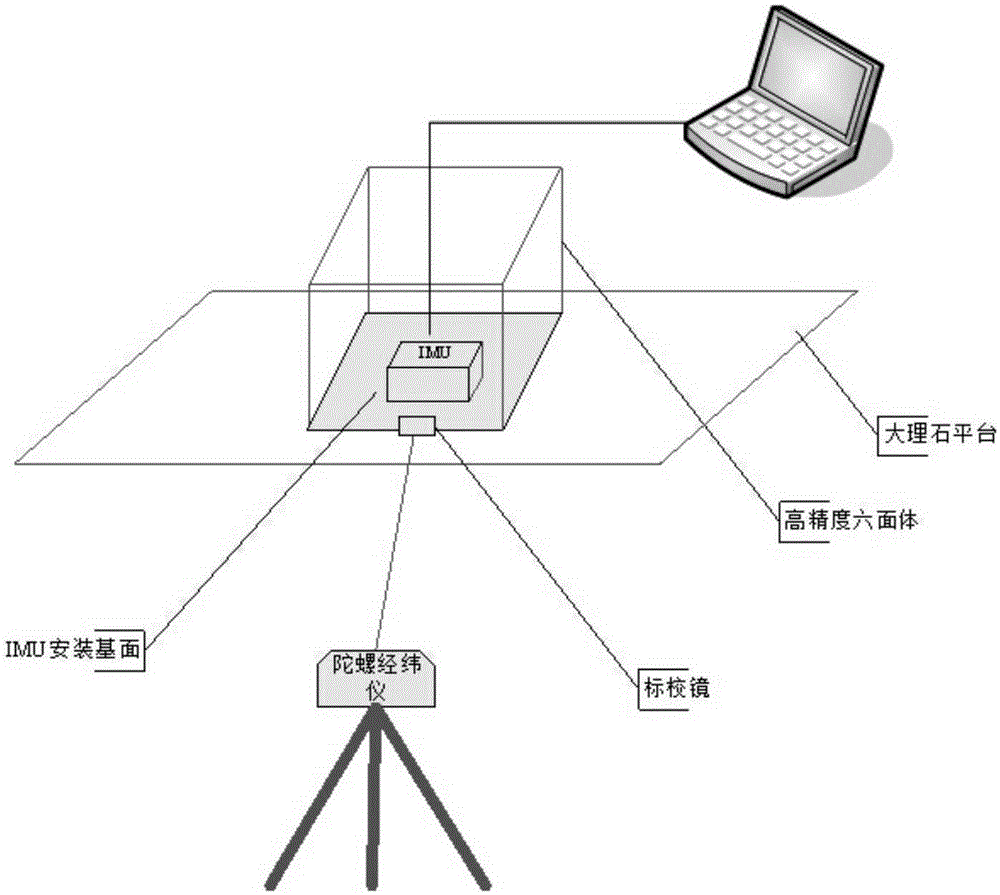
[0043] refer to figure 1 As shown, the present invention discloses a multi-coordinate system calibration method for a single-axis modulation laser gyro inertial navigation system, comprising the following steps: a), the system enters the preparation stage after being powered on, and determines the attitude of the IMU installation base surface; b), records Navigation raw data; c), calibration software reads raw data to calculate attitude conversion Euler angle; d), marble calibration is completed; e), azimuth mirror calibration preparation; f), determine inertial navigation horizontal base plane and orientation mirror normal direction; g), record navigation raw data; h), calibration software reads raw data to calculate attitude conversion Euler angle; i), azimuth mirror calibration completed.
[0044] (1) Marble calibration plan
[0045] The purpose of marbl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More