

A articulated dulcimer playing robot
A robot and joint-type technology, which is applied in the direction of manipulators, joints, manufacturing tools, etc., can solve the problems of not involving the research of automatic playing robots, poor accuracy of percussion positions, poor performance stability, etc., and achieve compact structure and vivid percussion actions , control simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
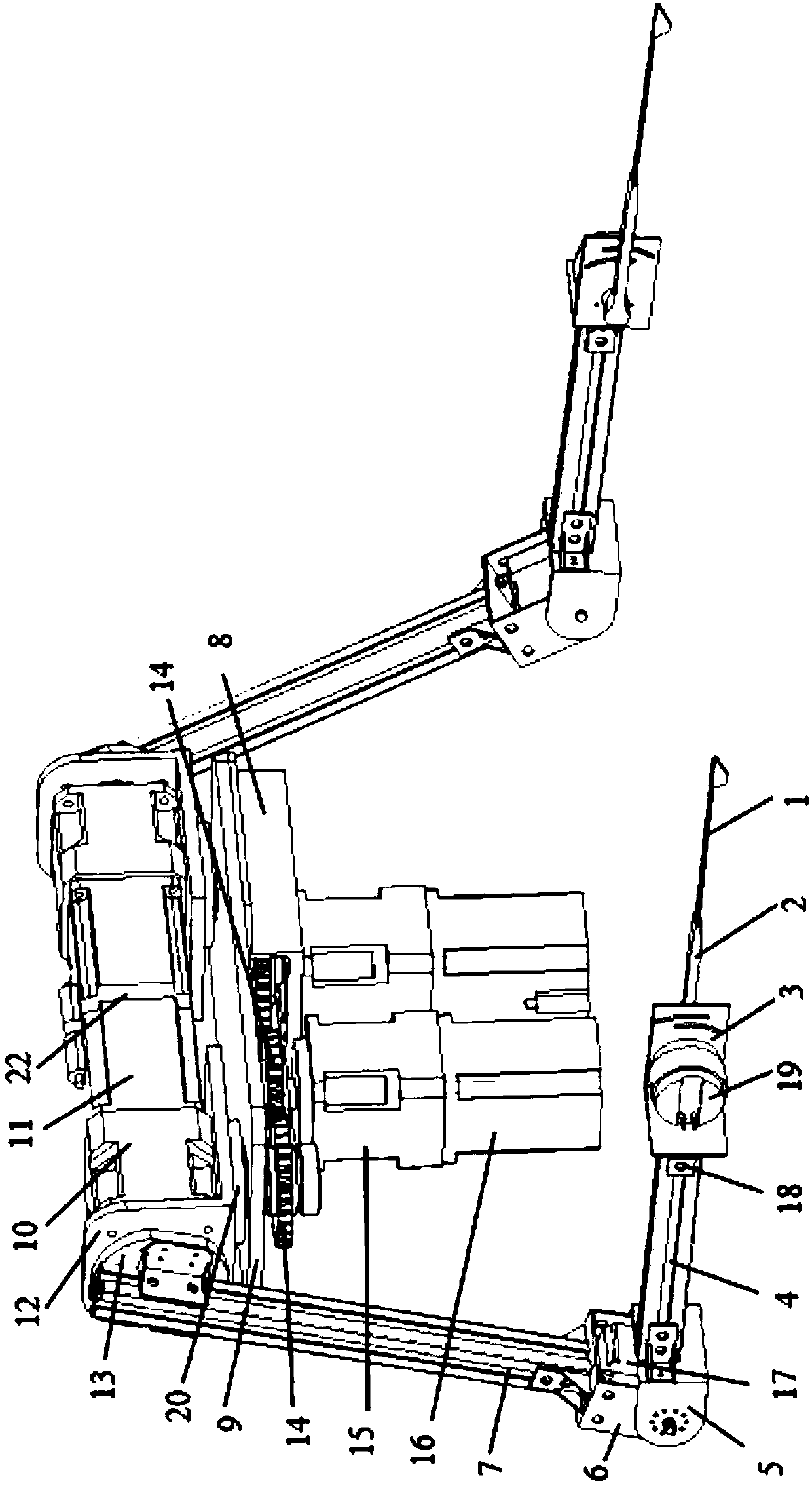
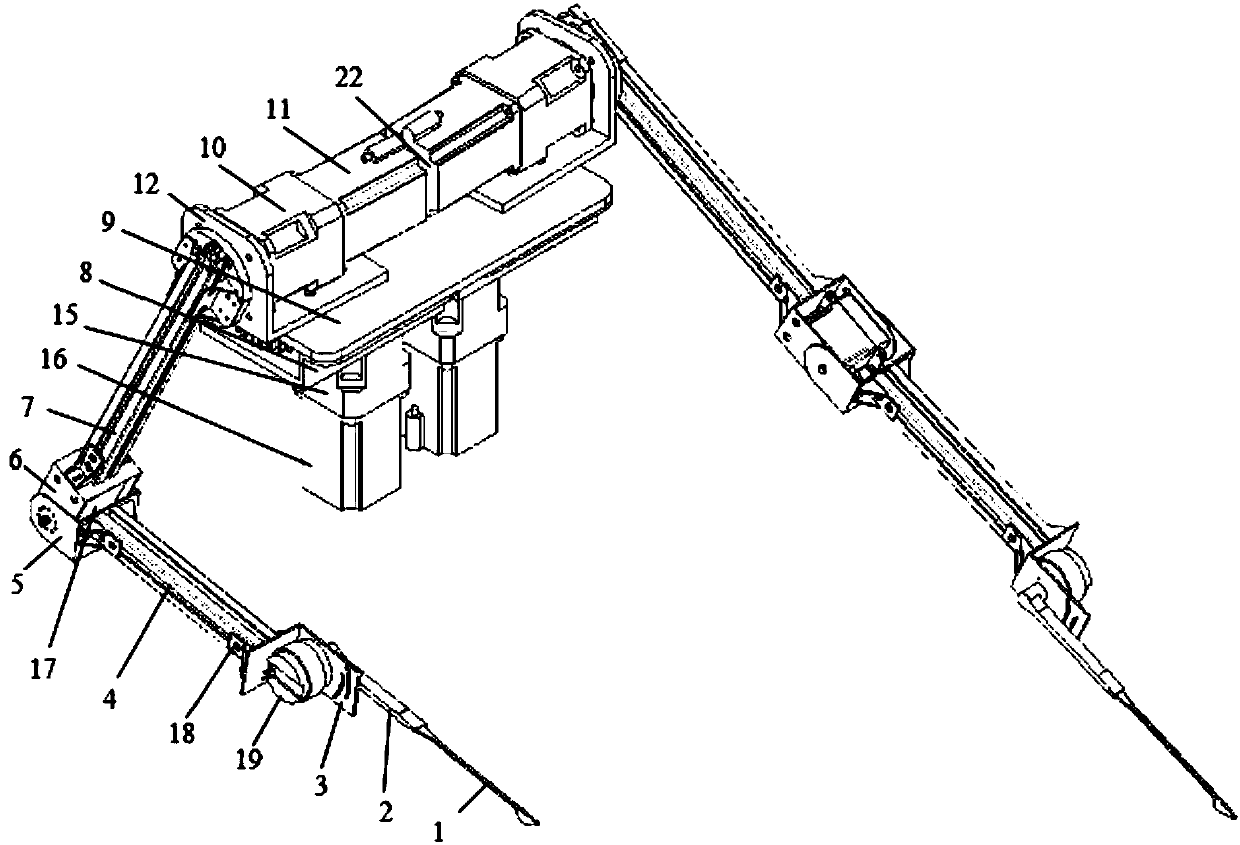
[0025] Embodiment 1: the articulated dulcimer playing robot of the present invention has a structure such as figure 1 , 2 shown. It includes at least the shoulder joints, elbow joints, wrist joints with the same structure on the left and right sides and symmetrically installed, the upper arm 7 and the forearm 4, the waist motor 16, the waist reducer 15, the waist transmission shaft 20 and the transposition gear pair 14 .
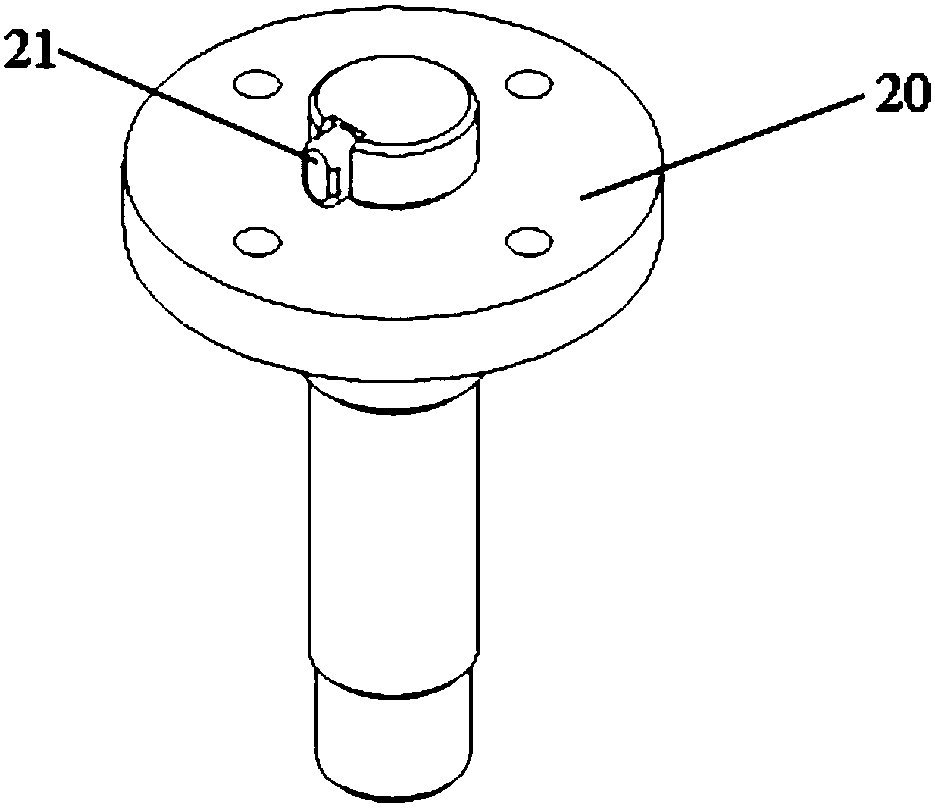
[0026] The structure of waist drive shaft 20 is referring to image 3 . The waist drive shafts on both sides are installed on the upper support plate 9 and the lower support plate 8 through two bearings, the upper support plate and the lower support plate are fixed together by bolts, and the upper end of the waist drive shaft is connected by the flat key 21 and the bolts The shoulder base 12 on the same side; the transposition gear pair 14 on each side has two identical transposition gears, and one transposition gear in the transposition gear pair is ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More