

Upper-limb rehabilitation training robot
A rehabilitation training and robot technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of not too complete functions, limited use of rehabilitation robots, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with specific embodiments.
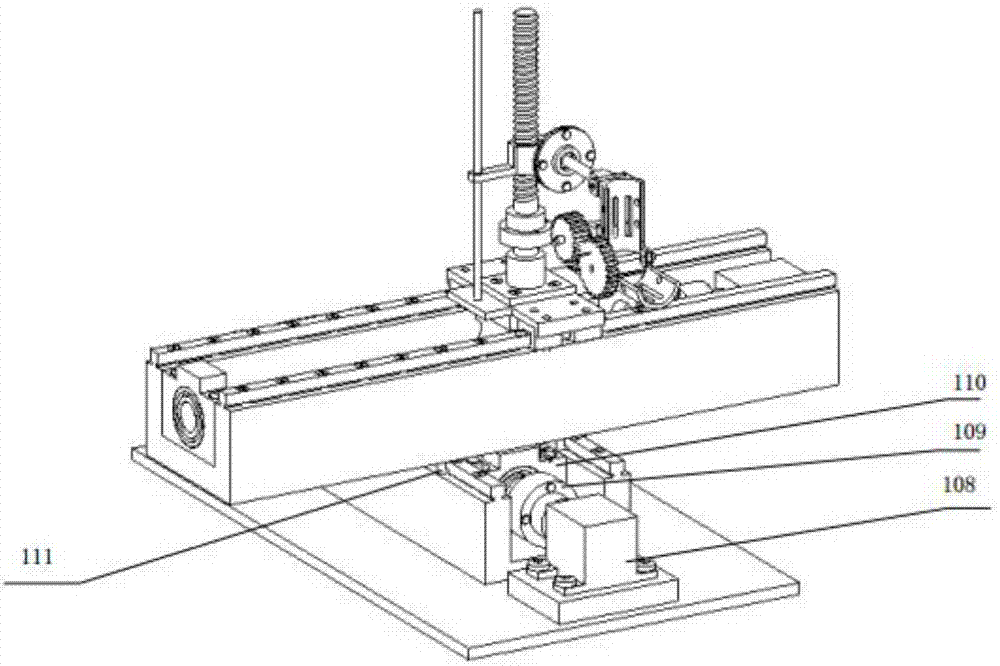
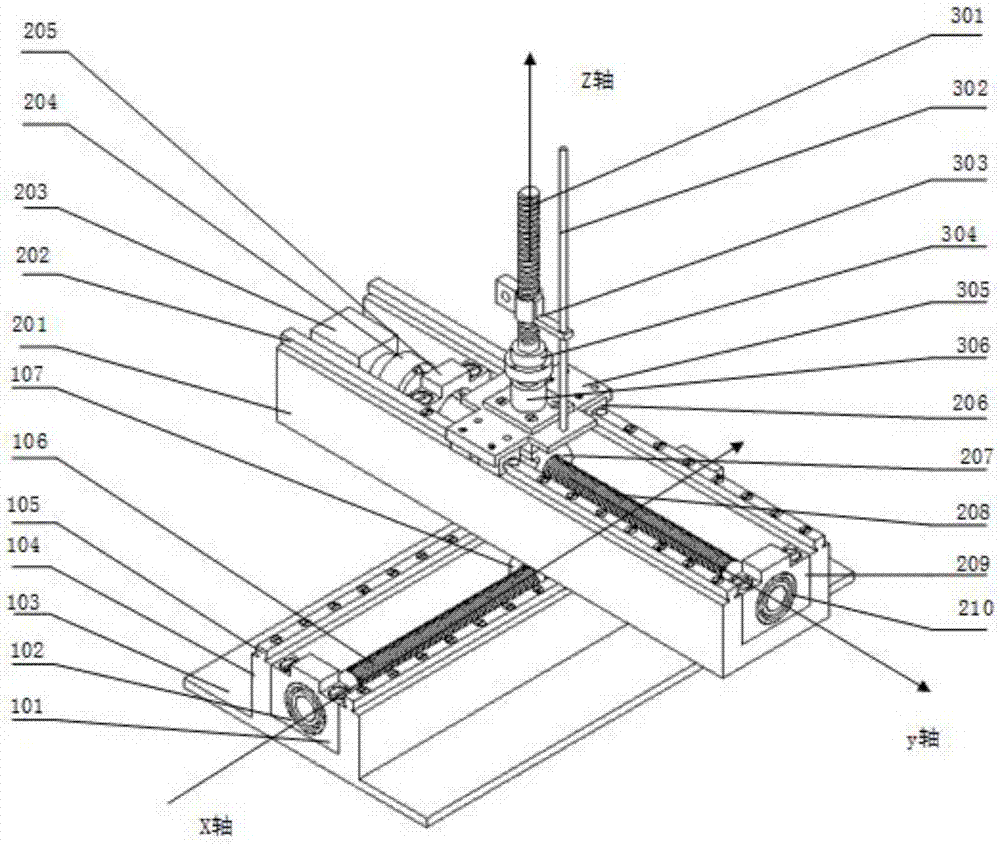
[0020] Such as figure 1 and figure 2 As shown, the screw nut movement mechanism moving along the X-axis direction includes: screw shaft 106, nut assembly 107, guide rail 105, guide rail slider assembly 111, base 104, screw fixed end 110, screw support end 101, Angular contact ball bearing 102, stepping motor 108 and shaft coupling 109; base 104 and stepping motor 108 are fixed on the base 103, screw mandrel fixed end 110 and screw mandrel support end 101 are fixed on base 104 two ends, angle The contact ball bearing 102 is fixed on the screw support end 101, the guide rail 105 is screwed on the base 104 through a screw group, the guide rail slider assembly 111 is nested on the guide rail 105 and connected with the nut assembly 107, and the stepping motor 108 is passed through the coupling 109 connects the screw shaft 106 and drives it to rotate, so that the nut assembl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More