

Biped walking robot and gravity center adjusting device thereof
A walking robot, center of gravity adjustment technology, applied in transportation and packaging, vehicle body, body stability, etc., can solve problems such as complex control and algorithm, inability to guarantee stable walking of the robot, and inability to achieve stable control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with specific embodiment and accompanying drawing, set forth more details in the following description so as to fully understand the present invention, but the present invention can obviously be implemented in many other ways different from this description, Those skilled in the art can make similar promotions and deductions based on actual application situations without violating the connotation of the present invention, so the content of this specific embodiment should not limit the protection scope of the present invention.
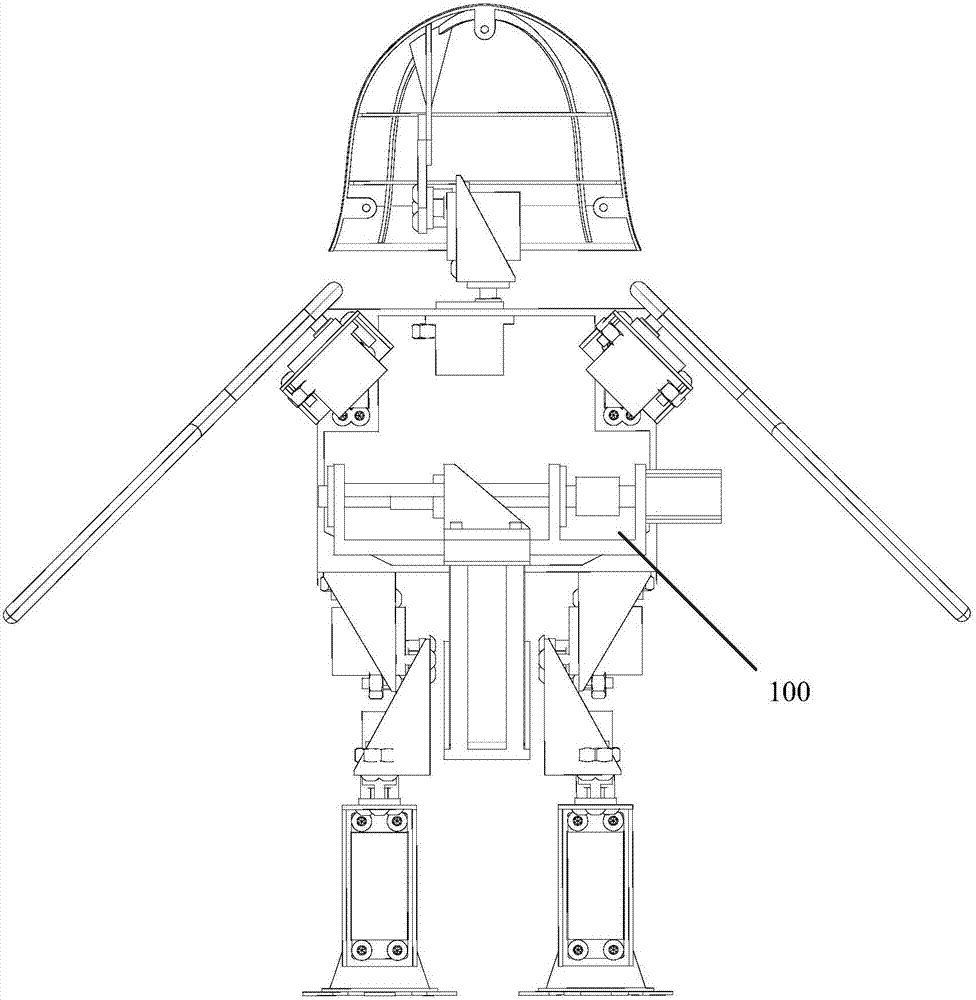
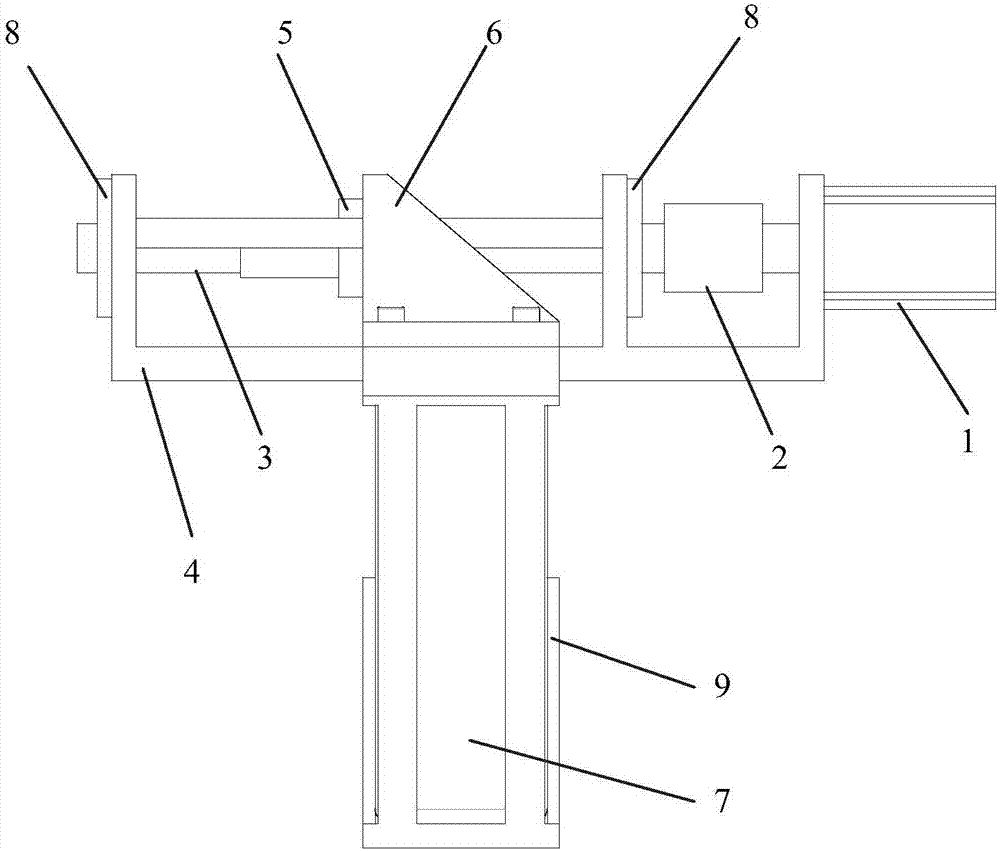
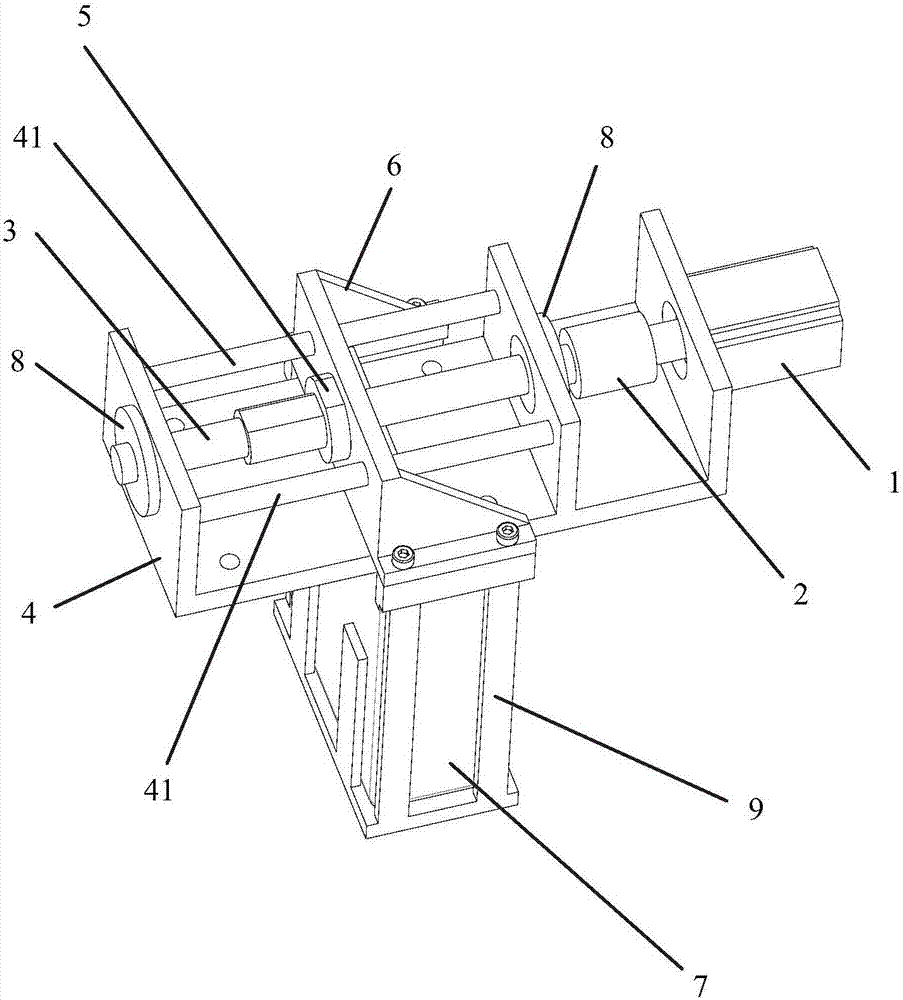
[0039] figure 1 It is an overall schematic diagram of a biped walking robot according to an embodiment of the present invention. figure 2 It is a front view of a center-of-gravity adjustment device for a biped walking robot according to an embodiment of the present invention. image 3 It is a perspective view of a center-of-gravity adjustment device for a biped walking robot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More