

Nonlinear constrained primal-dual neural network robot action planning method
A nonlinear constraint, neural network technology, applied in the field of original-dual neural network robot motion planning, to overcome the problem of error accumulation and eliminate the problem of initial error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
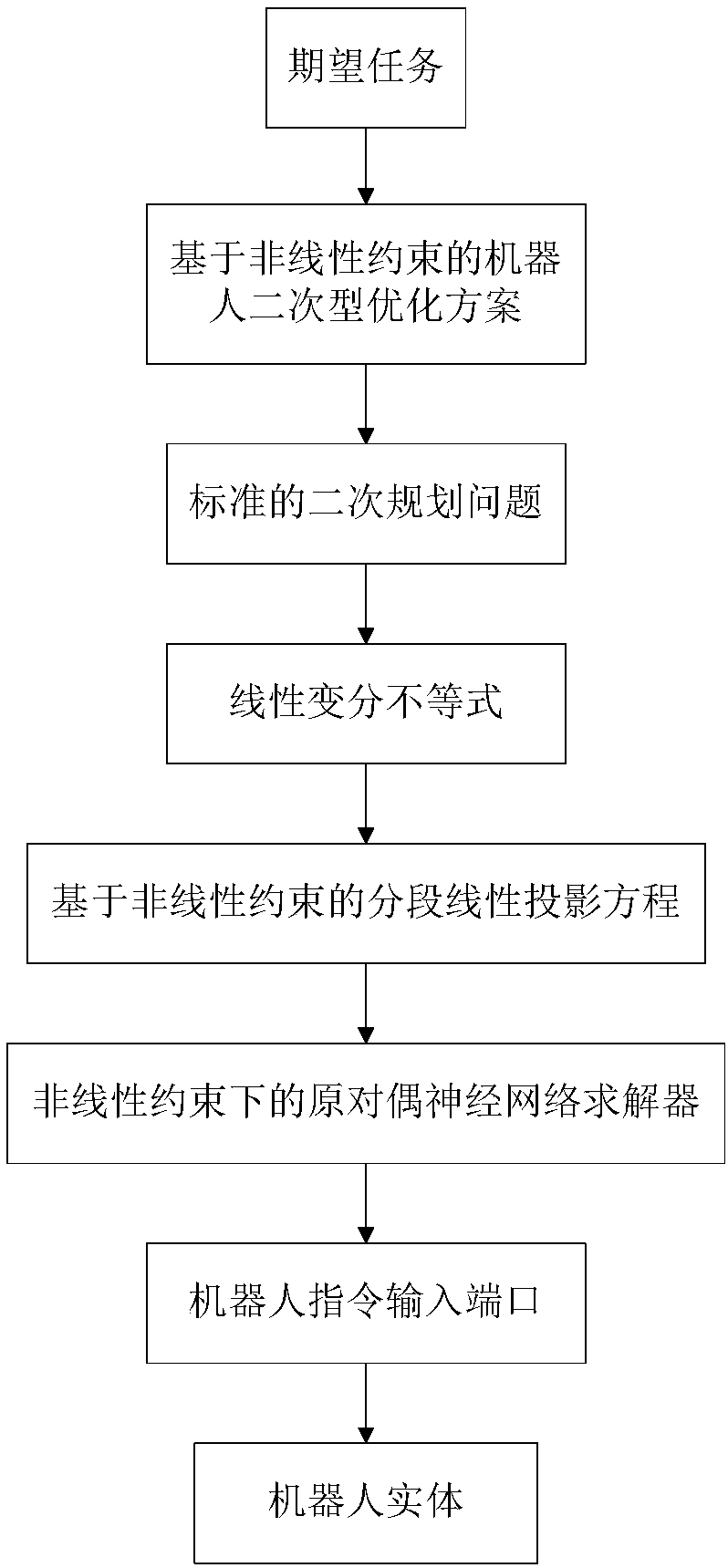
[0048] A primal-dual neural network robot action planning method under nonlinear equality constraints, comprising the following steps:
[0049] S1. Based on the expected task, the current state of the robot is obtained through the sensor and the inverse kinematics analysis of the robot trajectory is performed on the velocity layer using the quadratic optimization scheme. The performance index of the quadratic optimization scheme is the minimum speed two-norm and has A nonlinear equality constraint and a feasible set of robot joint angle constraints;
[0050] S2, converting the quadratic optimization scheme of the robot based on nonlinear constraints designed in step S1 into a standard form of a quadratic programming problem;
[0051] S3. Solving a standard quadratic programming optimal solution problem in step S2 is equivalent to solving a linear variational inequality problem;
[0052] S4, converting the linear variational inequality problem in step S3 into a solution to a p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More