Inchworm type inching walking robot
A walking robot and robot technology, applied in the field of high-end science and precision micro-operation, can solve the problems of poor motion stability, small load bearing, low running speed, etc., and achieve high precision, fast response speed, and large output displacement in a single step. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
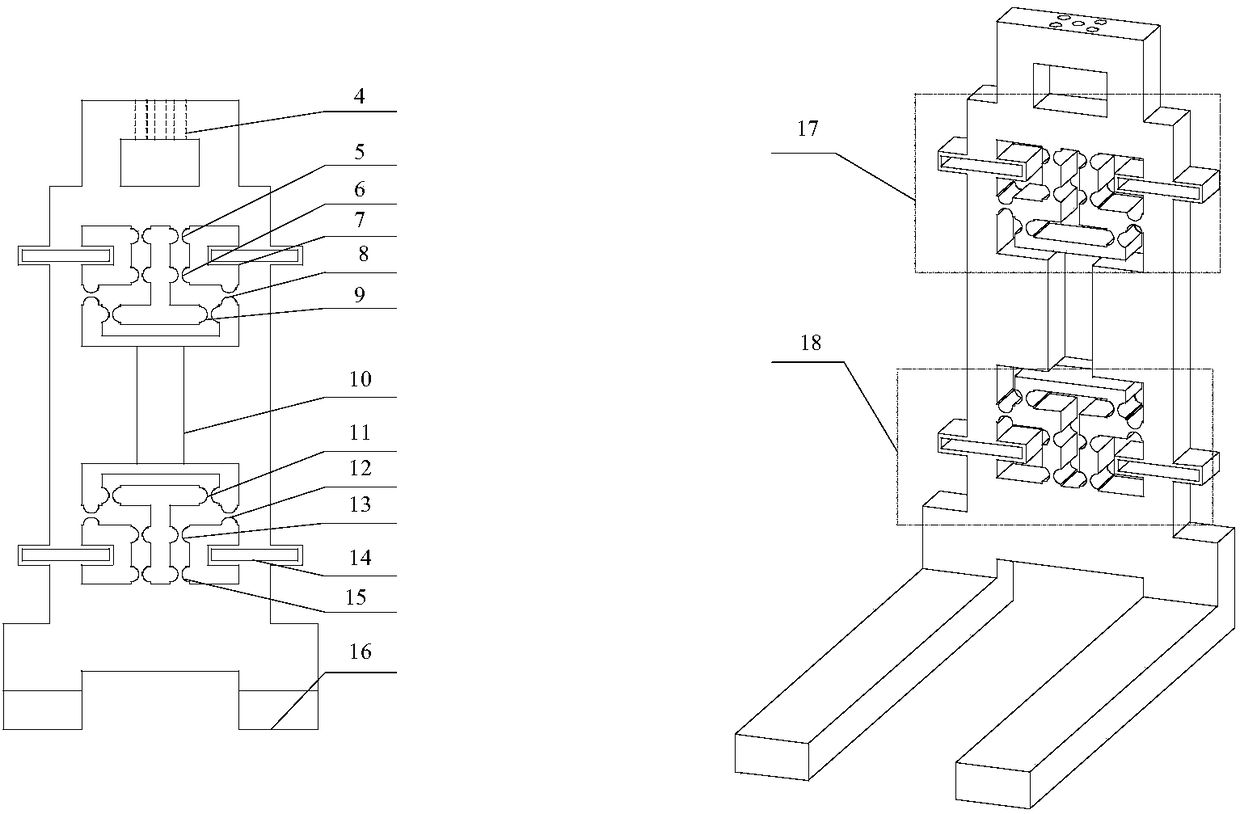
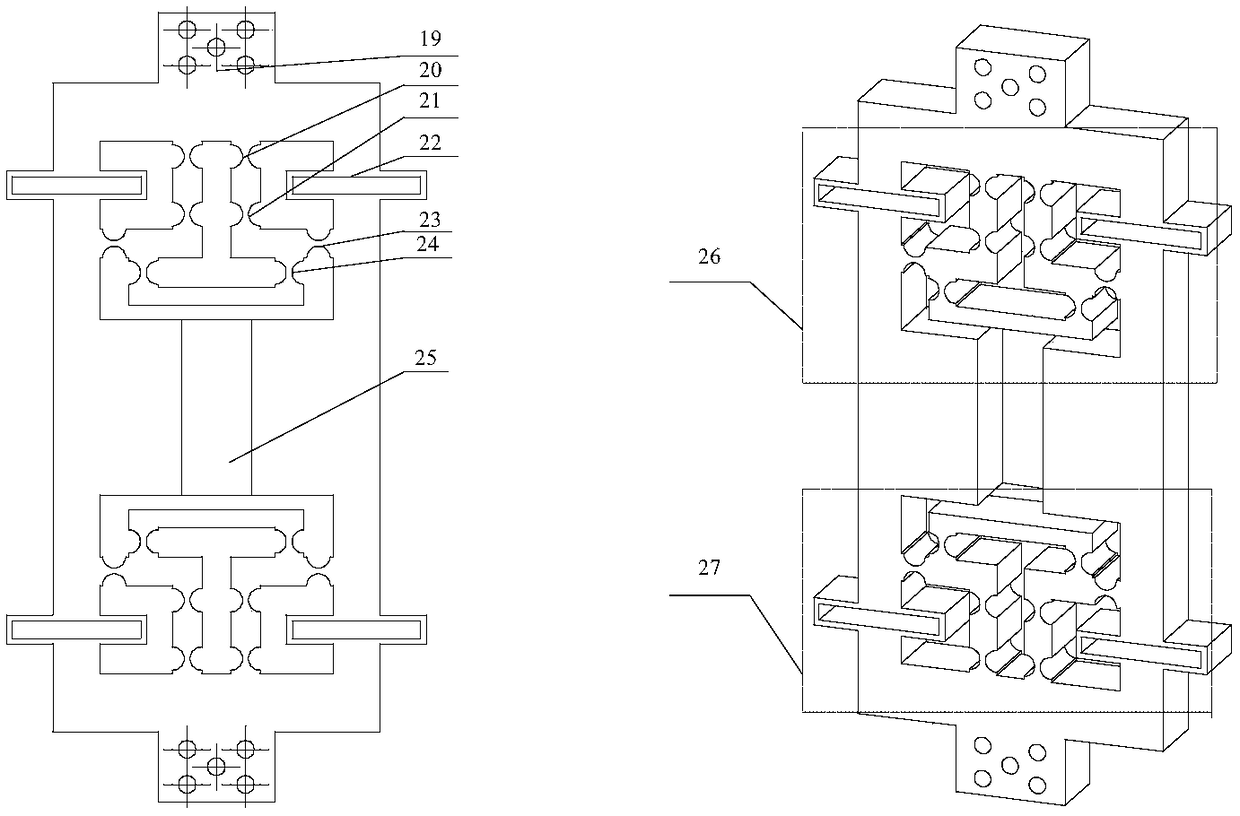
[0031] Such as Figure 1-Figure 5 As shown, a kind of inchworm-type micro-moving walking robot of the present invention includes: 10. The driving end of the clamping mechanism, 5. The straight-round flexible hinge, 6. The straight-round flexible hinge, 7. The right-angle flexible hinge, 8. Straight round flexible hinge, 9. Straight round flexible hinge, 4. Five bolt holes, 11. Straight round flexible hinge, 12. Straight round flexible hinge, 13. Straight round flexible hinge, 15. Straight Circular flexible hinge, 14. Right-angle flexible hinge, 16. Base structure, 17. Driving branch chain, 18. Driving branch chain; 25. Drivi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More