

Five-degree-of-freedom precise series-parallel robot with mobile platform additional constraints
A technology with additional constraints and a moving platform, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the number of structural joints and structural parts, complex assembly, high precision requirements, etc., to achieve simple structure, small number of parts, Ease of Difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] A five-degree-of-freedom precision serial-parallel robot with additional constraints on the moving platform of the present invention will be described in detail below in conjunction with the embodiments and drawings.
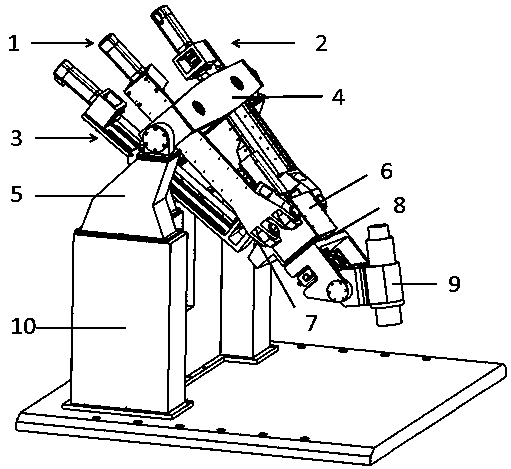
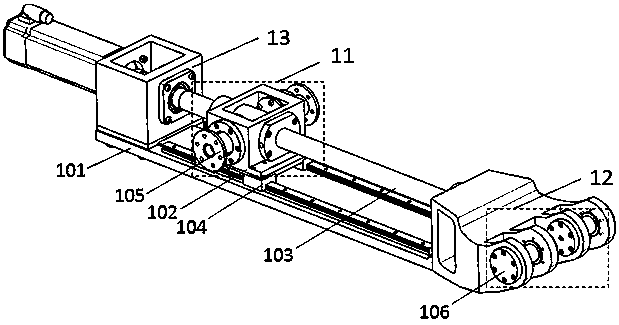
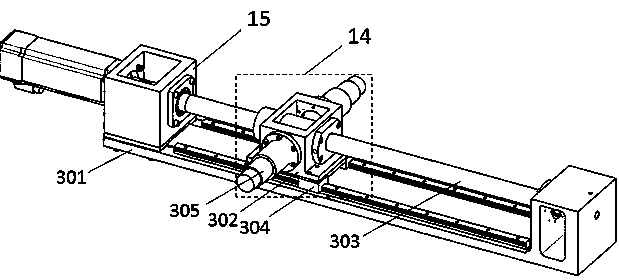
[0040] Such as figure 1 , figure 2 , image 3 As shown, a five-degree-of-freedom precision series-parallel robot with additional constraints on the moving platform includes a rotating platform 4, a base bracket 5, a moving platform 6, a precision ball joint 7, a series first joint 8, a moving end 9, and a base 10. The first rod 1, the second rod 2, and the third rod 3. The first rod 1 and the second rod 2 have the same structure, including a first hinge 11, a second hinge 12, a first connecting structure 13 and a driving device , the third rod 3 includes a hinge 14, a second connecting structure 15 and a driving device, and the first rod 1 and the second rod 2 respectively pass through the first hinge 11 and are connected to both sides of the rotating ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More