

A bionic quadruped animal toy with somatosensory remote control turning
A bionic, limb technology, applied in the field of remote control toys, can solve the problems of inability to turn, poor interaction, single rigidity, etc., and achieve the effect of flexible and variable gait.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the purpose of the present invention, technical solutions and advantages clearer, the following will combine figure 1 - figure 2 The accompanying drawings describe the present invention in further detail.
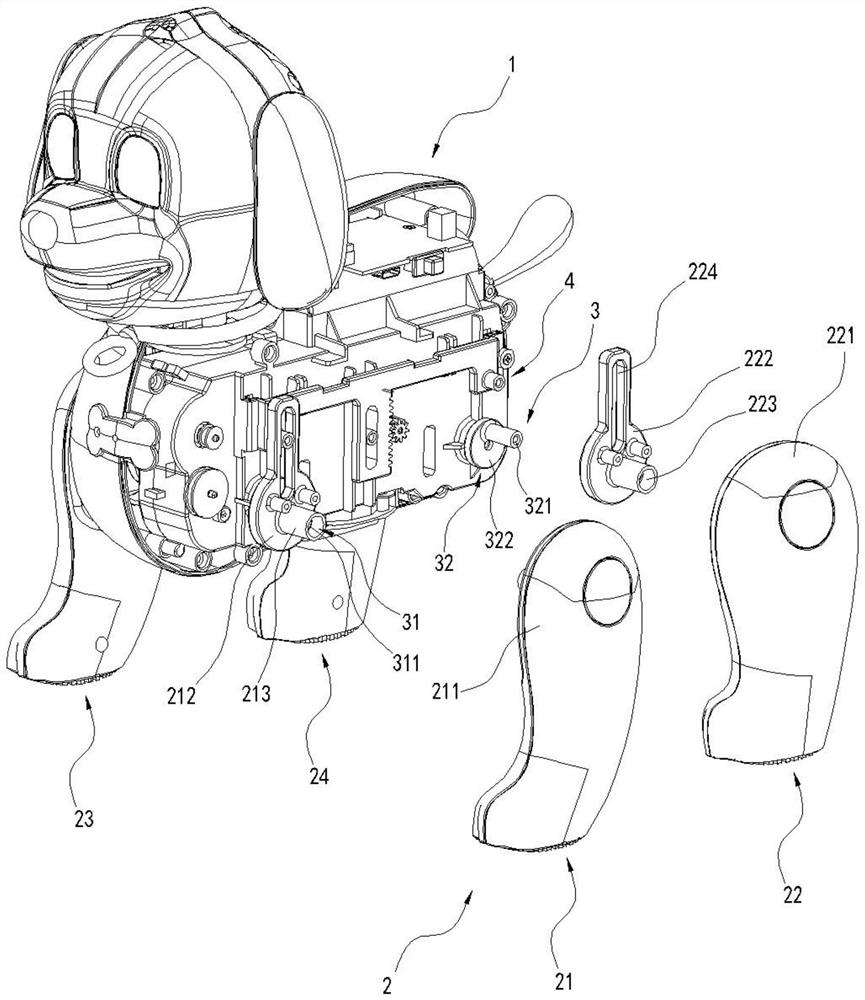
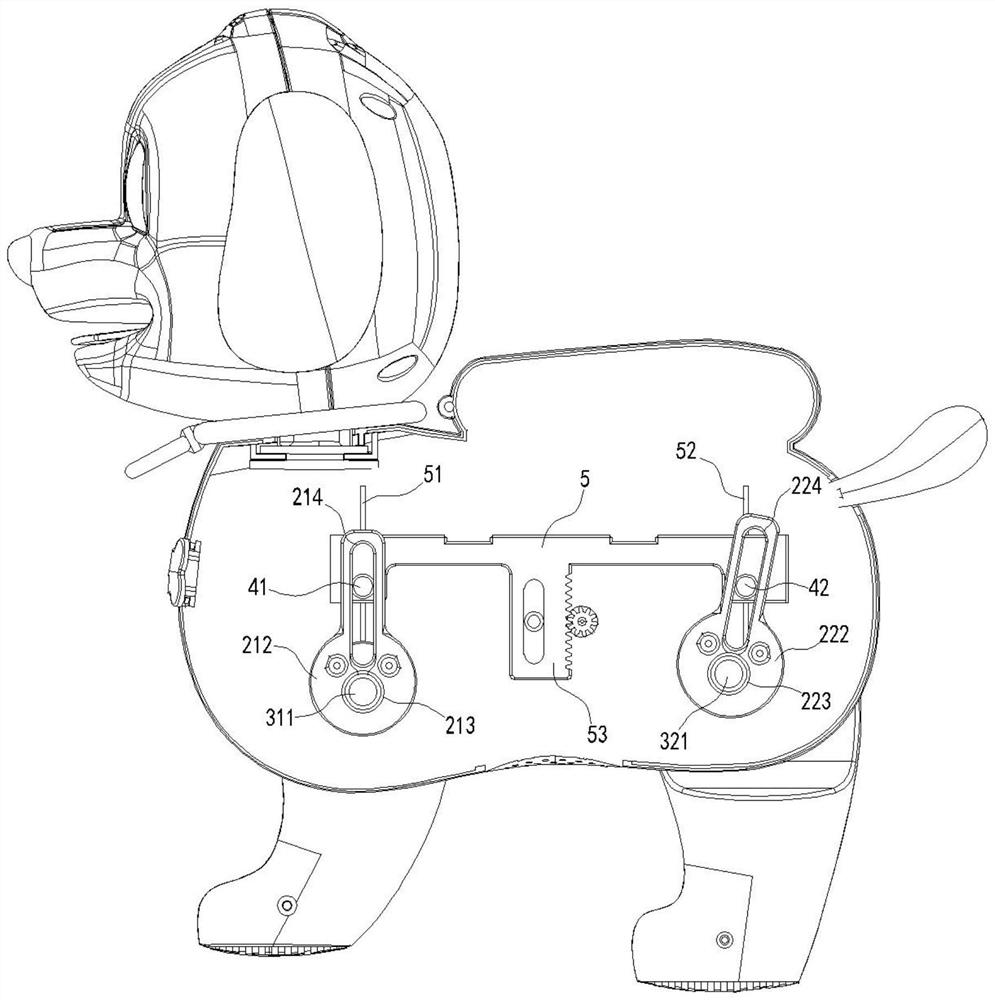
[0027] refer to figure 1 - figure 2 As shown, a bionic turning electric four-limbed animal toy includes a torso 1 and a limb 2; a planetary block 3 is arranged on the torso 1 for rotation, and the planetary block 3 is driven by a limb drive motor to move in a circumferential direction; a fulcrum is provided for sliding on the torso 1 Block 4, the fulcrum block 4 is driven by a step adjustment motor to slide and adjust the distance with the planetary block 3;
[0028] Planetary block 3 includes left front planetary block 31, left rear planetary block 32, right front planetary block, right rear planetary block, fulcrum block 4 includes left front fulcrum block 41, left rear fulcrum block 42, right front fulcrum block, right rear fulcrum block, lim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More