

Humanoid stair climbing robot and control method thereof
A robot and stair-climbing technology, which is applied in the field of humanoid stair-climbing robot and its control, can solve problems such as inflexibility, inability to automatically climb stairs and stair-climbing gait
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
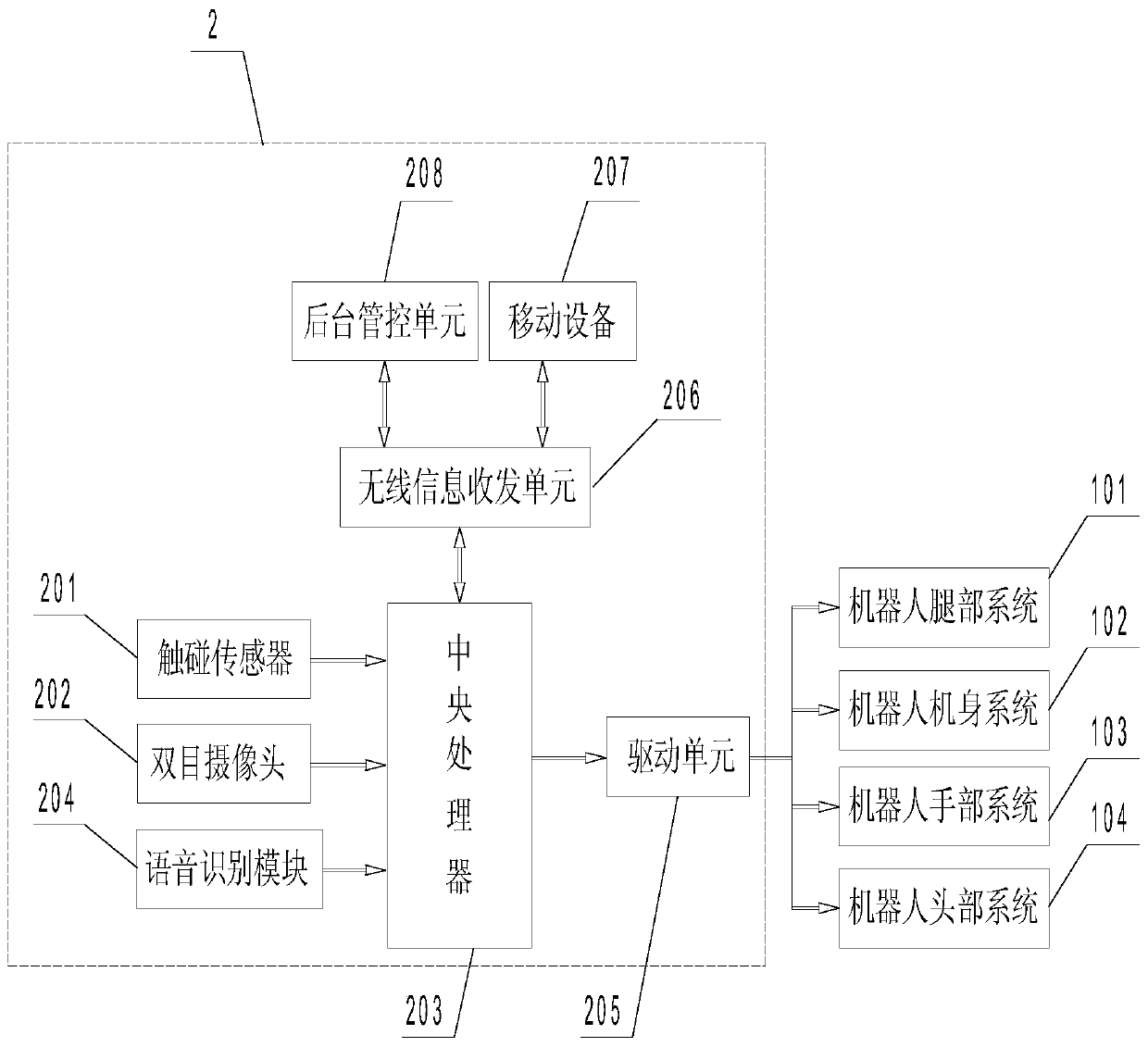
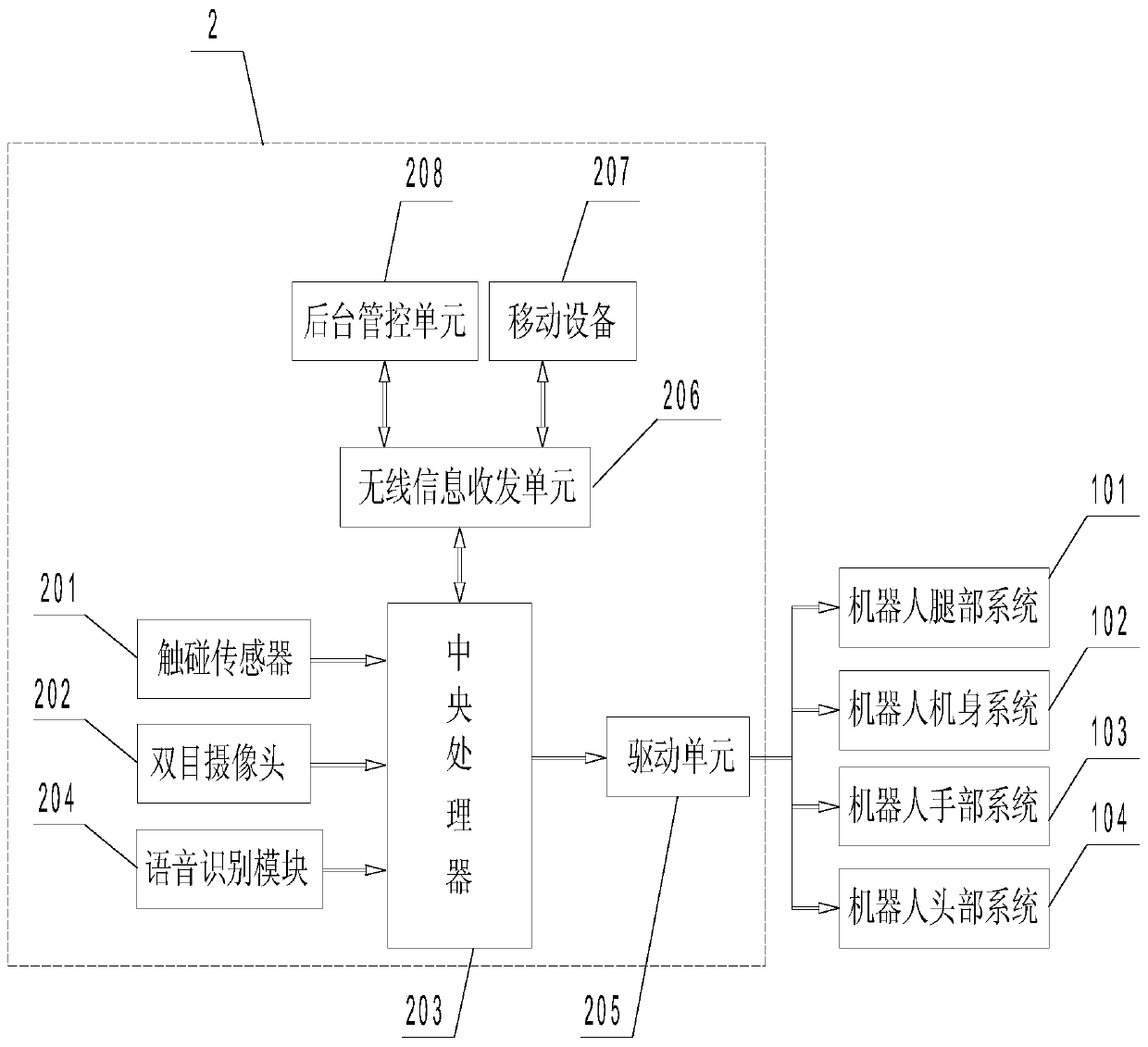
[0040] A humanoid robot for climbing stairs, including a humanoid robot body 1, a control system 2, and a power supply system 3; the humanoid robot body 1 includes a robot leg system 101, a robot body system 102, a robot hand system 103, and a robot head System 104; the humanoid robot body 1 has 19 robot motion joints consistent with the human body motion joints, and each joint is provided with a joint motor 105, the robot leg system 101, the robot hand system 103 The top is respectively connected with the output end of the robot body system 102; the bottom end of the robot head system 104 is connected with the output end of the robot body system 102; the control system 2 is connected with the power supply system 2 and is installed on the robot body body system 102.
[0041] The control system 2 includes a touch sensor 201, a binocular camera 202, a central processing unit 203, a speech recognition module 204, a drive unit 205, a wireless information sending and receiving unit...
Embodiment 2
[0049] A control method for a humanoid stair-climbing robot, the method is that the robot recognizes the height of the stairs through a binocular camera, then moves the center of gravity to the left and lifts the right leg to the previous step, and then moves the center of gravity to the right and lifts the left leg to place on the On the same step, move the center of gravity to the right, lift the left leg and place it on the next step, then move the center of gravity to the left, lift the right leg and place it on the same step, and so on. This cycle is realized by imitating the gait of people climbing stairs Stair climbing function.
[0050] The method includes the following steps:
[0051] a). The robot automatically walks to the front of the stairs and returns to the state of standing at attention, recognizes the stairs through the binocular camera, and measures the height H of each step;
[0052] b). Move the center of gravity to the left leg by adjusting the joint moto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More