

A kind of miniature flipping stair-climbing robot
A technology for climbing stairs and robots, which is used in the fields of search and rescue, investigation, and detection, and can solve problems such as inability to climb stairs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
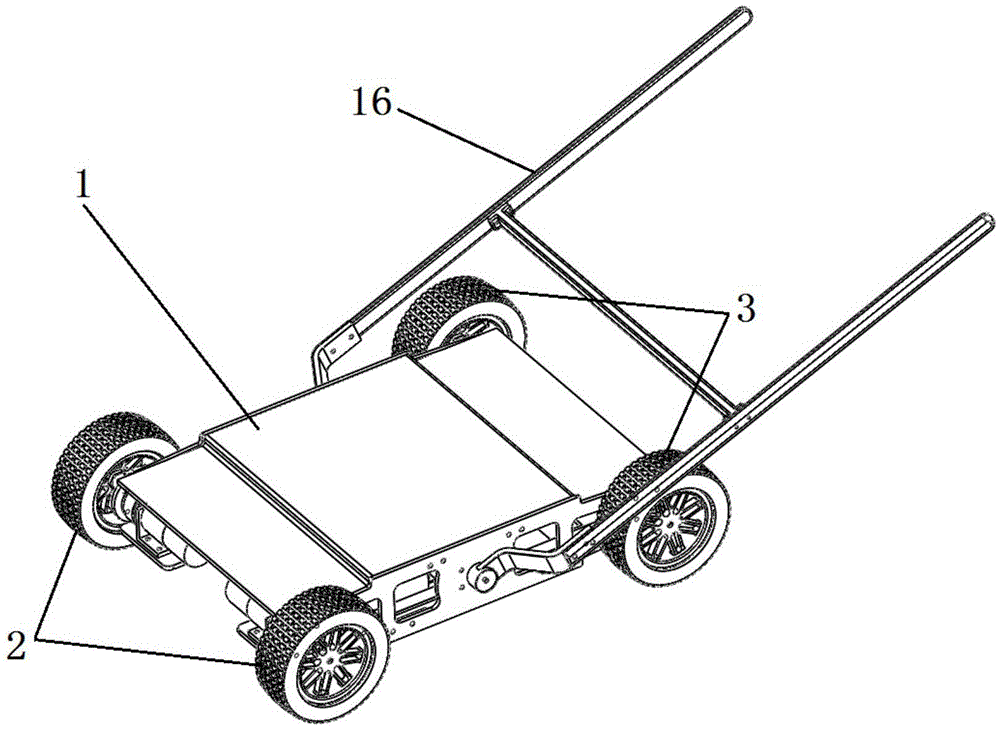
[0025] The invention provides a miniature flipping stair-climbing robot, the core idea of which is to install a swing arm assembly and a flipping drive assembly on the basis of an ordinary wheeled chassis to change the way of power transmission during driving, so that the miniature robot has The function of climbing stairs.
[0026] Below in conjunction with accompanying drawing and give embodiment simultaneously, the present invention is described in detail:
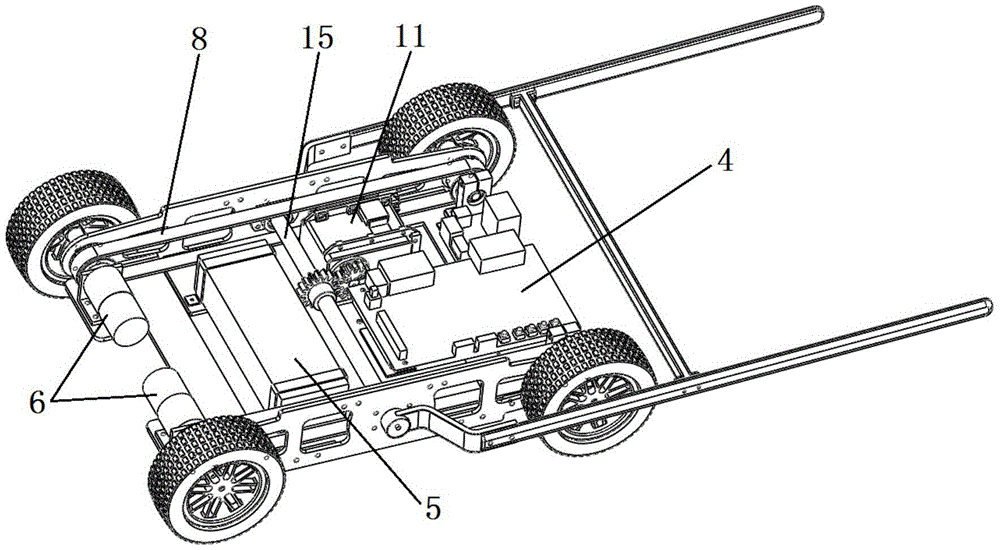
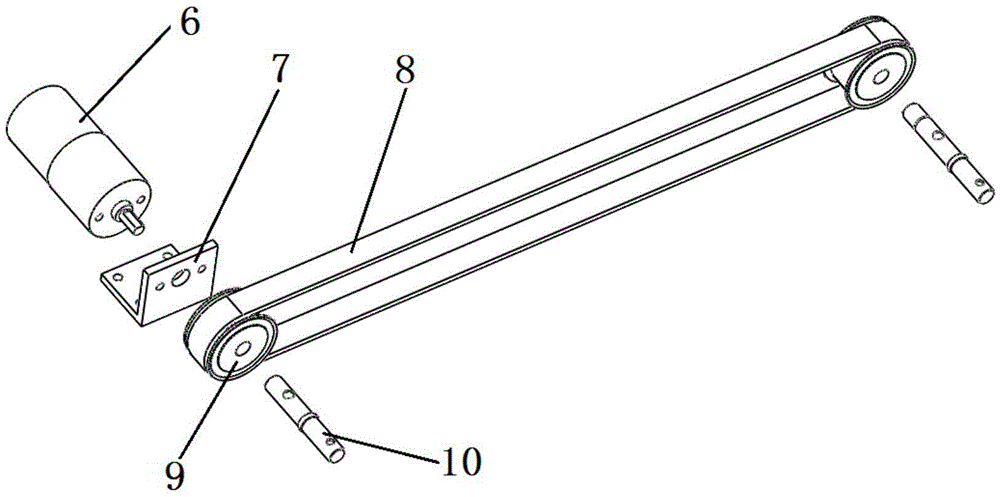
[0027] like figure 1 As shown, a miniature turntable stair robot has a structure comprising: a housing 1, a front wheel 2, a rear wheel 3, a control module 4, a power supply 5, a traveling motor 6, a traveling motor bracket 7, a synchronous belt 8, and a synchronous belt Wheel 9, drive shaft 10, flip drive assembly and swing arm assembly.
[0028] The turning drive assembly specifically includes a turning motor 11 , a turning motor bracket 12 , a driving wheel 13 , a driven wheel 14 , and a turning shaft 15 ; The o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More