

Four-mechanical-arm climbing type line patrol robot mechanical structure
A line inspection robot, mechanical structure technology, applied in the direction of manipulator, collector, overhead line/cable equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
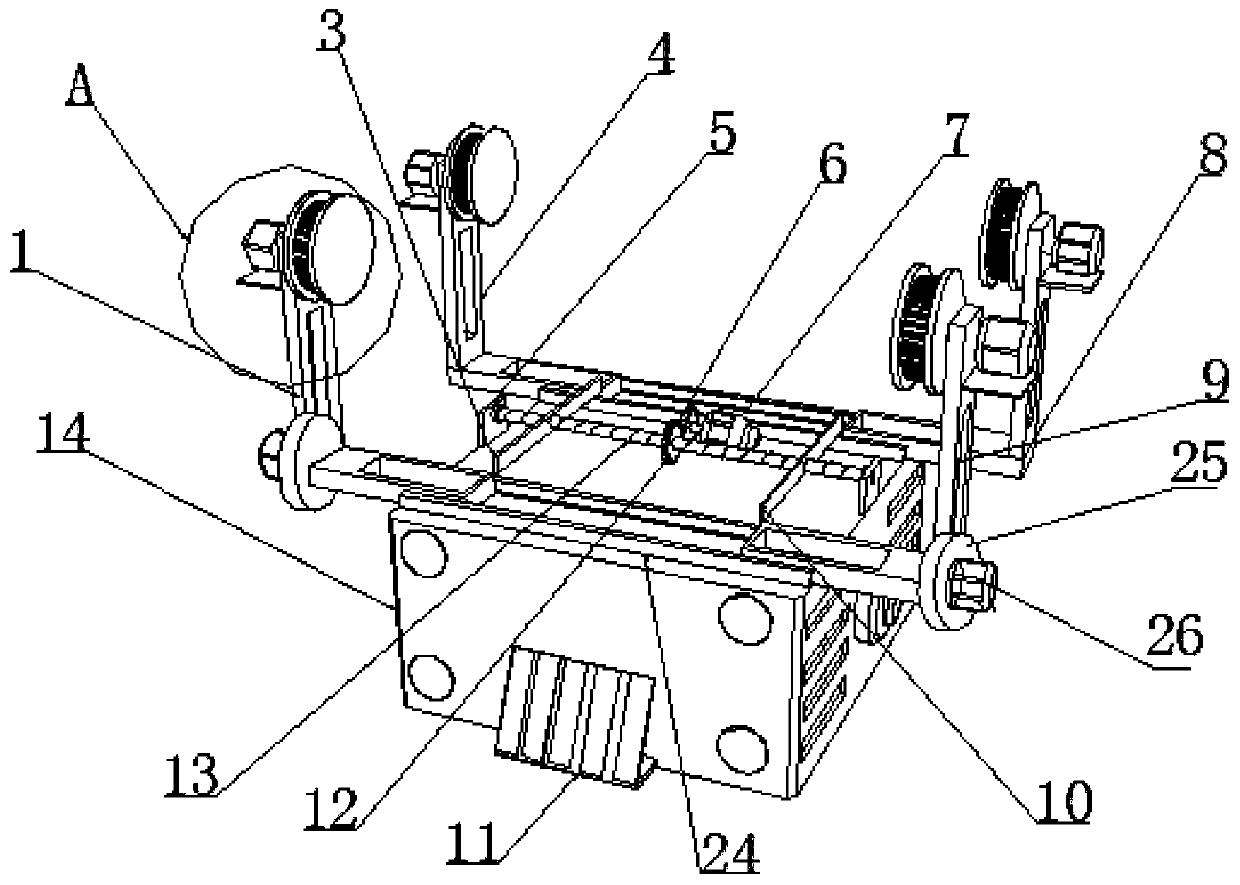
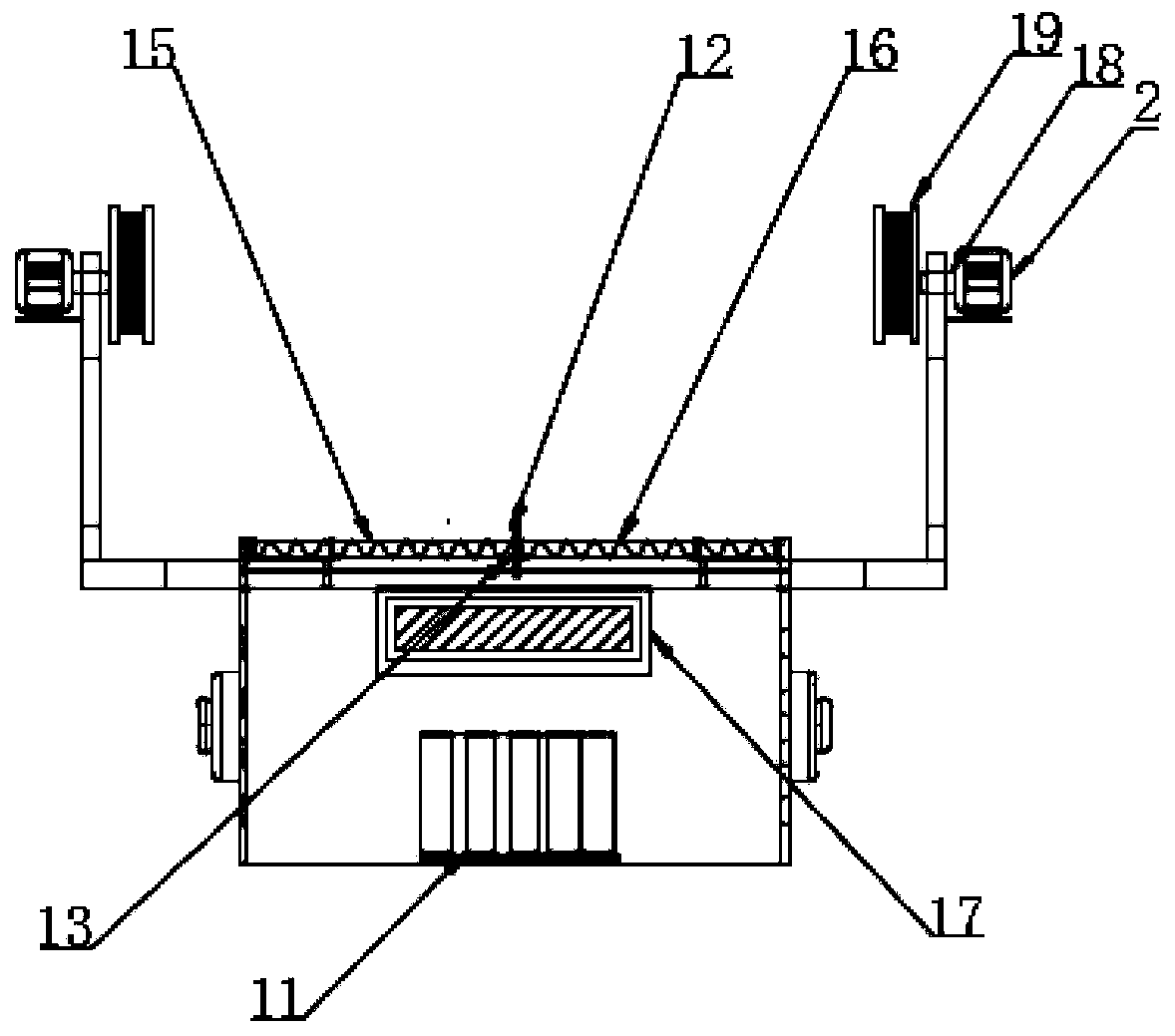
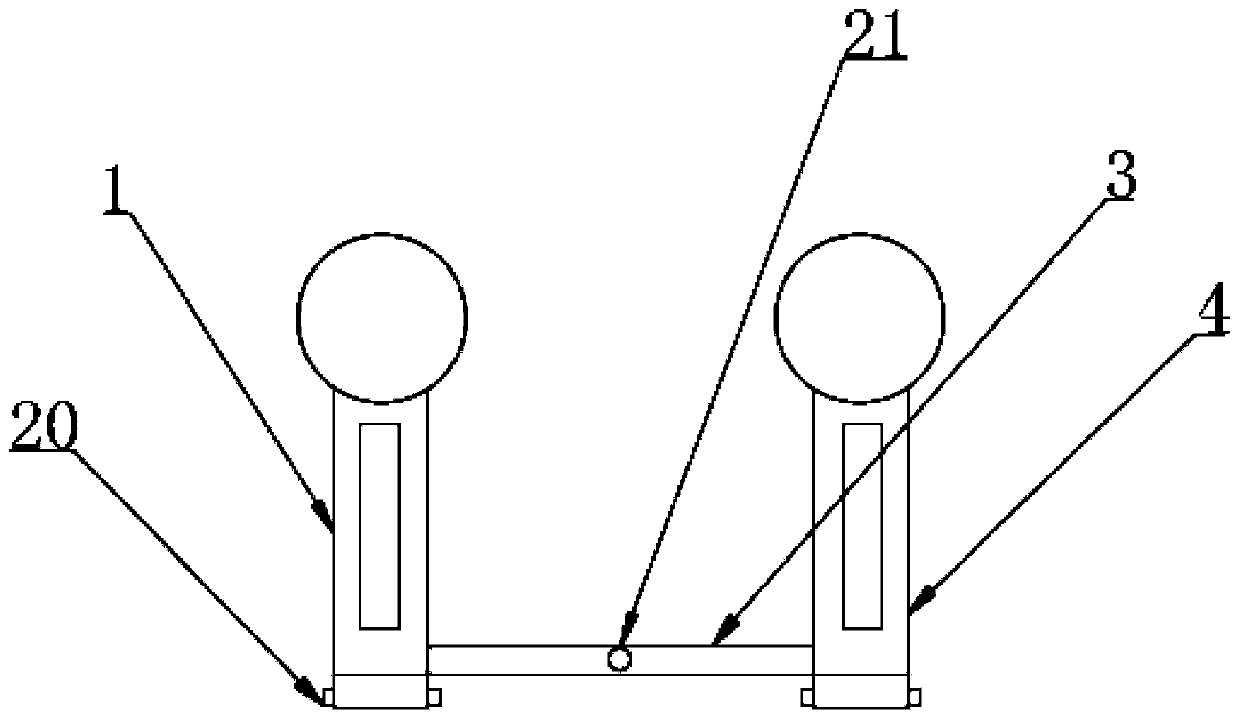
[0030] see Figure 1~5 , in an embodiment of the present invention, a mechanical structure of a four-manipulator climbing-type line patrol robot includes a line patrol machine body 14, a four-manipulator arm group, and a line roller 19, wherein the line patrol machine body 14 is provided with a rectangular distribution of Four robotic arm groups, each mechanical arm of the four mechanical arm groups is provided with a line roller 19, and the line rollers roll along the cable; it is characterized in that the line rollers and the four mechanical arm groups The mechanical arms are all made of insulating materials;
[0031] The distance between the four mechanical arm groups in the direction perpendicular to the extension direction of the cables is adjustable by a width adjustment mechanism, so as to adapt to the adjustment of the distance between the two cables;
[0032] Two of the four mechanical arm groups are swingable so as to realize the adjustment of the elastic support on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More