

Multi-moving time-sensitive target reconnaissance path planning method for unmanned aerial vehicle group
A path planning and unmanned aerial vehicle technology, applied in the field of avionics, can solve the problems of difficult to meet the real-time requirements of large-scale multi-target tasks, high path accuracy requirements, and poor dynamic adaptability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0101] Below in conjunction with the accompanying drawings, on the premise of the technical solution of the present invention, detailed implementation and specific operation process are given, which can be understood and implemented by those skilled in the art, but the protection scope of the present invention is not limited to the following examples.
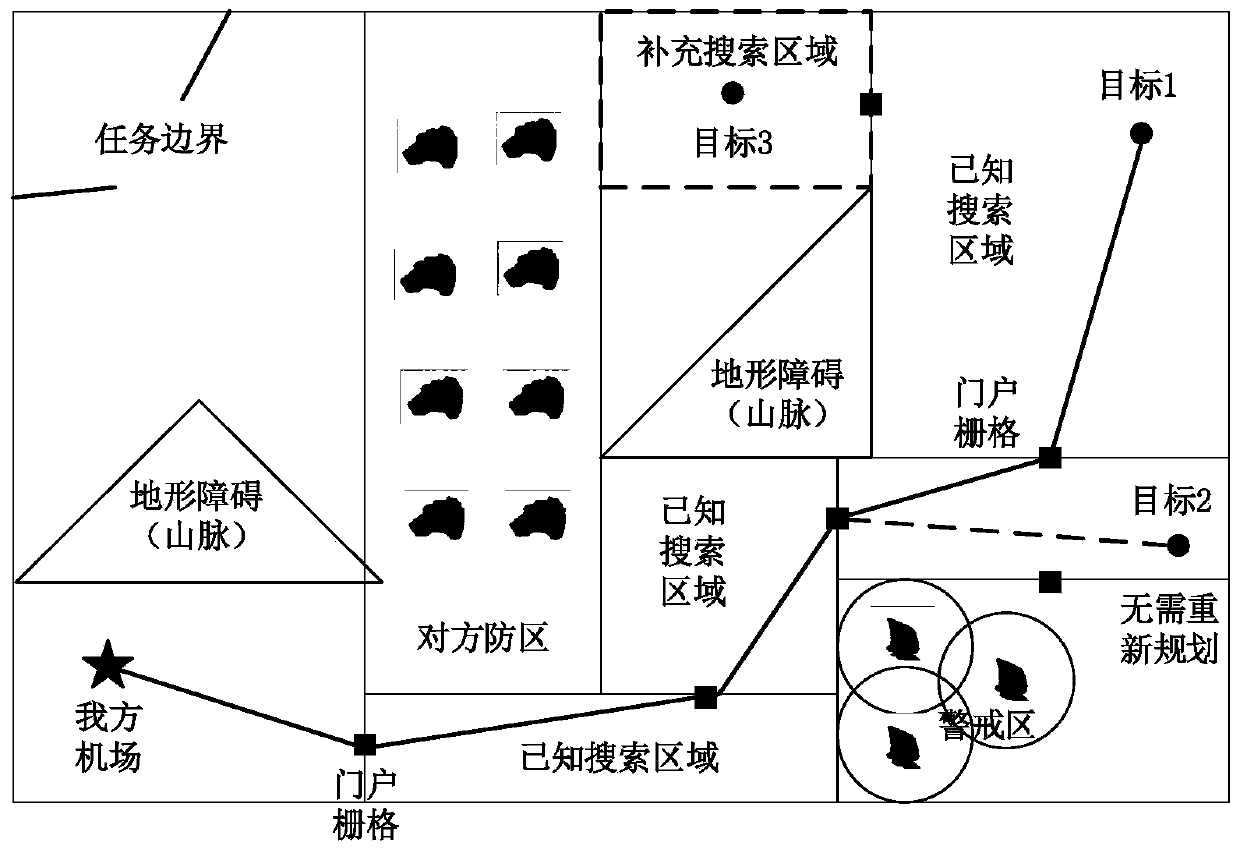
[0102] A reconnaissance path planning method for multi-moving time-sensitive targets by an unmanned aerial vehicle swarm, comprising the following steps:
[0103] Step 1: Construction of scouting area map environment
[0104] (1) Selection of working section
[0105] Select the scheduled flight height of the UAV mission as H uav The horizontal plane where it is located serves as the UAV cluster working profile α uav , UAV swarm working profile α uav The intersection with terrain obstacles in the mission area or the effective air defense area of the opponent is the no-fly zone for drones.
[0106] (2) Planning space raster...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More