

ESP Enhanced Control Method for Rear-drive Vehicle Based on Rear-wheel Steering
A technology of enhanced control and rear wheel steering, applied in the field of automobiles, can solve the problems of difficulty in the control process, inability to achieve control, and inaccurate control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
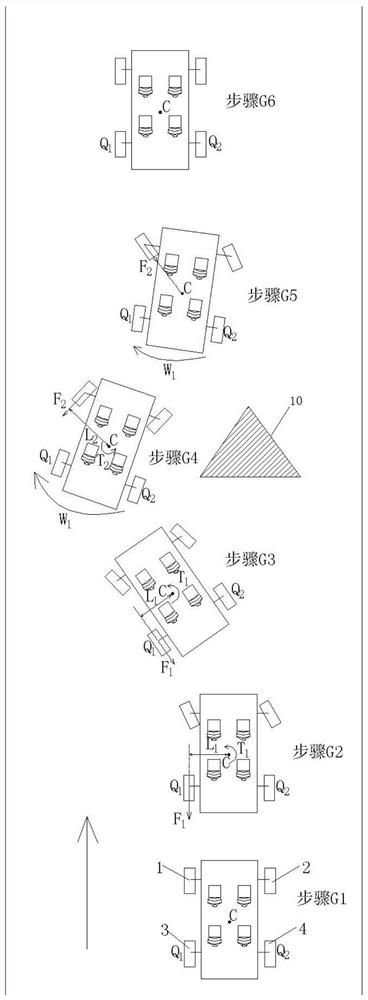
[0049] Embodiment 1. The specific control process of deflecting to the left to avoid obstacles
[0050] When the car is driving to the left to avoid obstacle 10, such as Figure 14 As shown, the state of the car in straight-line driving is shown in step S1; when the driver finds an obstacle 10 suddenly appearing ahead, he will quickly turn the steering wheel to the left as shown in step S2. At this time, the front wheels deflect to the left, and the rear The wheel deflects to the right by an angle β, at this time the Z axis and Q 2 The vertical line of is perpendicular to the action line of the resultant force applied to the center of the right rear wheel 4, ESP intervenes and applies the braking force F to the center of the left rear wheel 3 T , F T and the driving force F acting on the center of the left rear wheel 3 at this time D1 The directions are opposite and the values are equal. At this time, the resultant force F of the center of the right rear wheel 4 is 11 Wi...
Embodiment 2
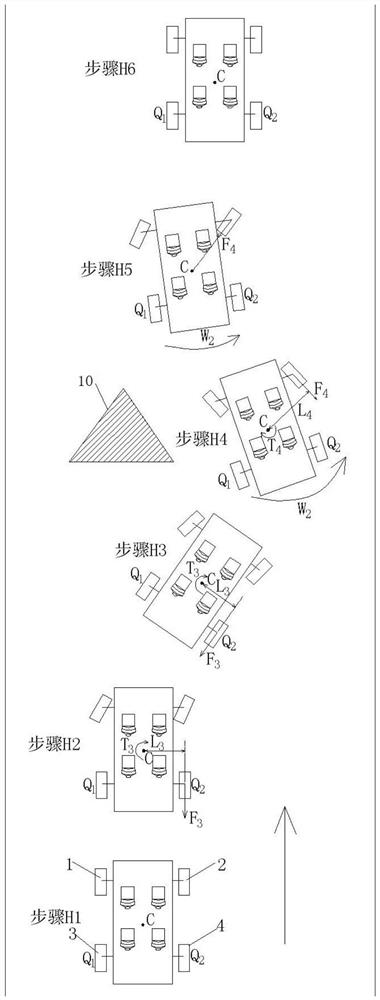
[0052] Embodiment 2. The specific control process of deflecting to the right to avoid obstacles
[0053] When the car is driving to the right to avoid obstacle 10, such as Figure 15 As shown, the state of the car in straight-line driving is shown in step K1; when the driver finds an obstacle 10 suddenly appearing ahead, he will quickly turn the steering wheel to the right as shown in step K2. At this time, the front wheels deflect to the right, and the rear The wheel deflects to the left by an angle θ, at this time, the Z axis and the Q 1 The vertical line of is perpendicular to the action line of the resultant force applied to the center of the left rear wheel 3, ESP intervenes and applies a braking force F to the center of the right rear wheel 4 T , F T and the driving force F acting on the center of the right rear wheel 4 at this time D2 The directions are opposite and the values are equal. At this time, the resultant force F of the center of the left rear wheel 3 21...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More