

A point-to-point tracking control method based on iterative learning of multi-agent trajectory update
An iterative learning and multi-agent technology, applied in the field of control, can solve problems such as point-to-point tracking control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
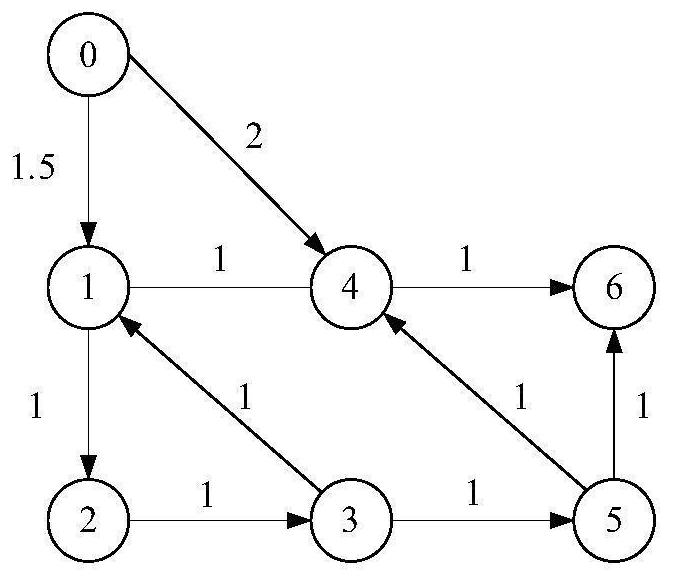
[0142] Consider a discrete heterogeneous multi-agent system composed of six different follower agents and a leader agent. The communication topology of the system is as follows: figure 1 As shown in , the number 0 represents the leader agent, and the numbers 1-6 represent the follower agent.
[0143] The dynamic model of the follower agent is as follows:
[0144]
[0145]
[0146]
[0147]
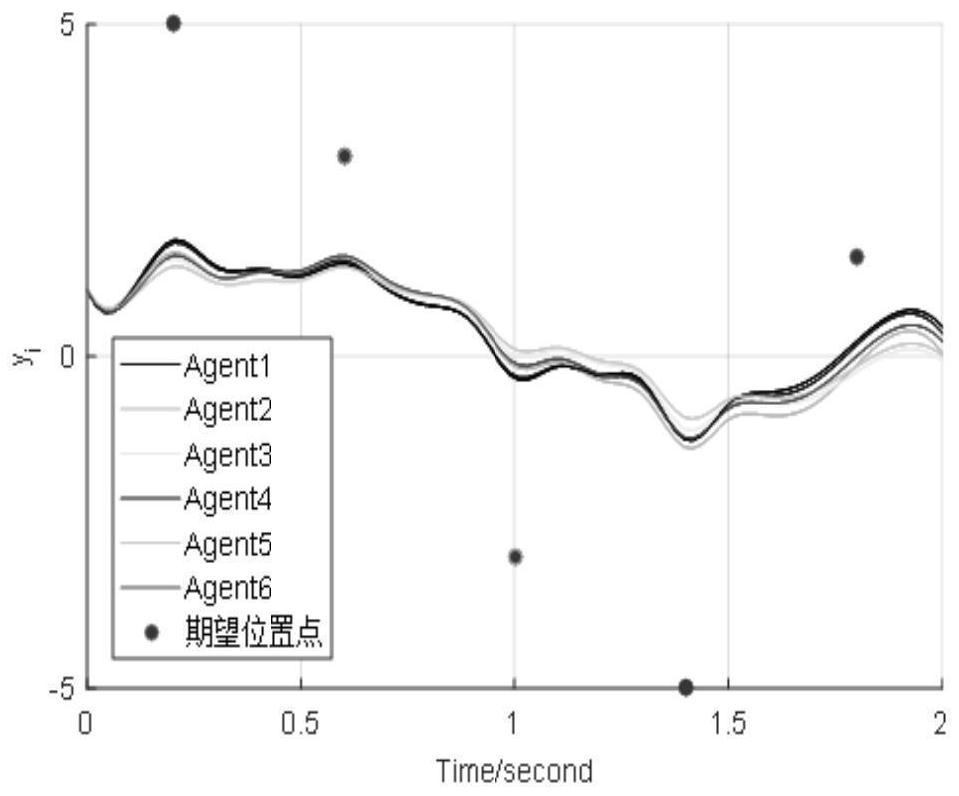
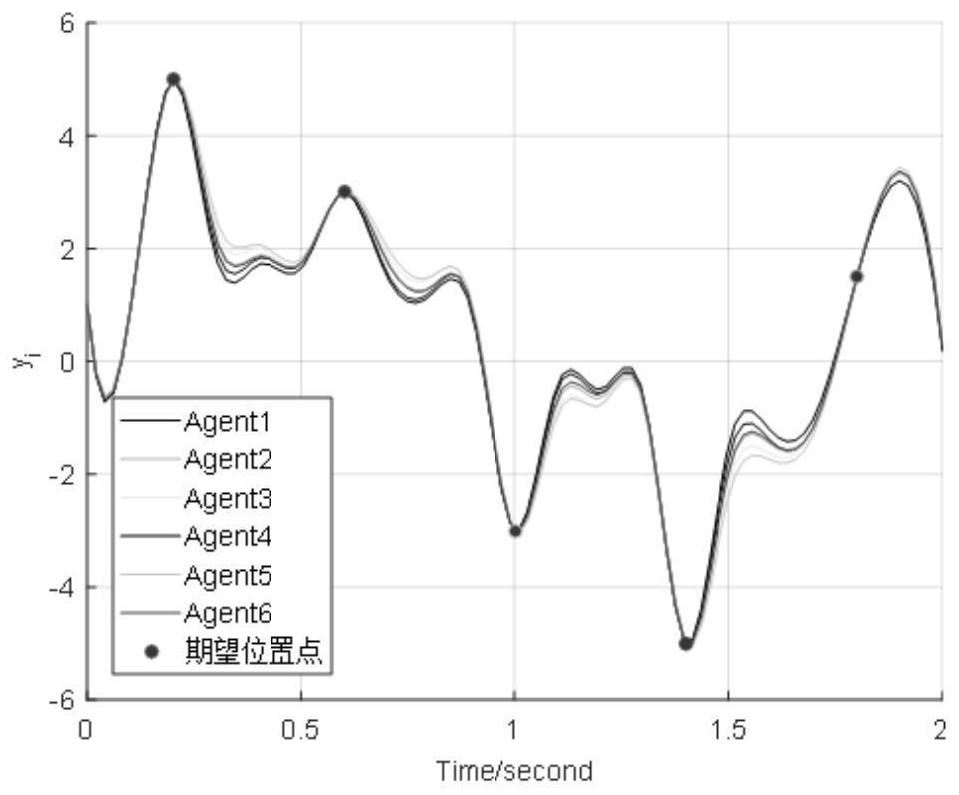
[0148] The system simulation time is t∈[0,2], and the sampling time is 0.1s. Select 5 points among them as the expected position points for tracking control research, the point to be tracked T={20,60,100,140,180}, and the expected output is y d (T)={5,3,-3,-5,1.5}.
[0149] place the desired position point y d (T)={5,3,-3,-5,1.5} is regarded as generated by the virtual leader numbered 0, and the above 6 agents are regarded as followers, only part of the followers are intelligent Physical ability directly obtains leader information. by communication topology figure 1 It ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More