Amphibious robot based on gear type transmission
An amphibious and gear transmission technology, applied in the field of robots, can solve the problems of low thrust efficiency in water, complicated switching modes, etc., and achieve the effects of long service life, clear division of labor, and difficult coupling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with accompanying drawing:
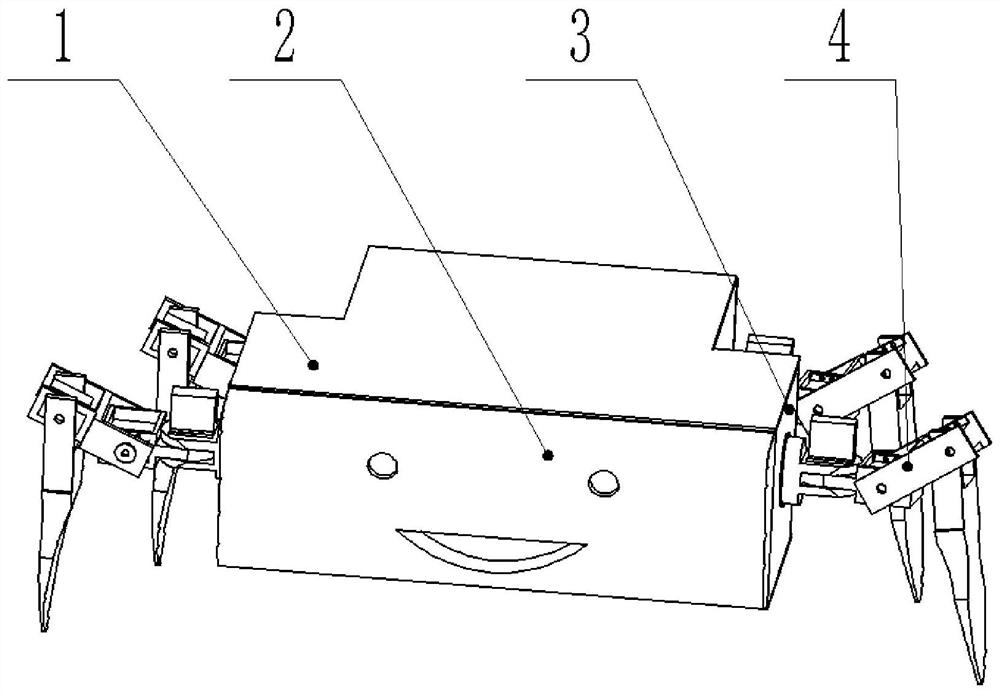
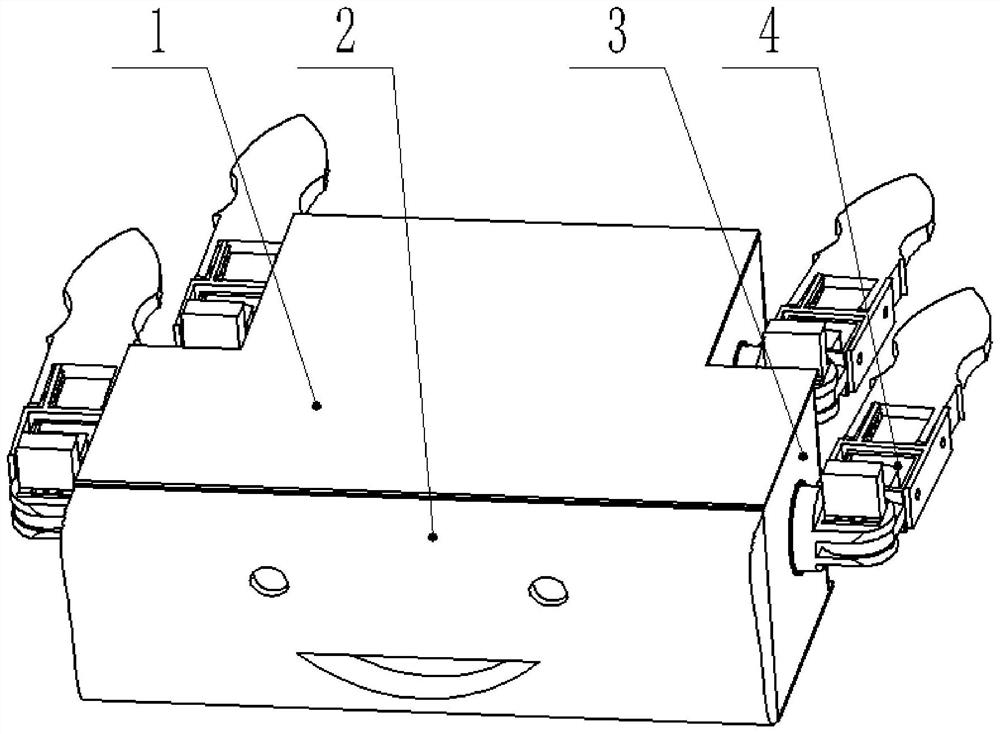
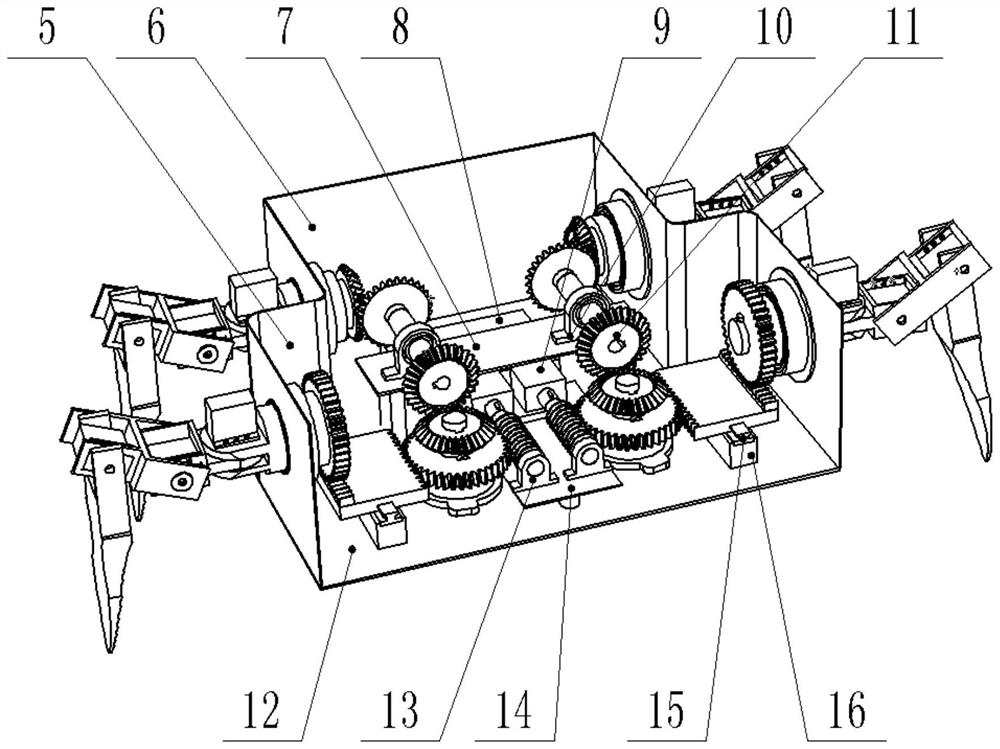
[0033] Such as Figure 1-7 Shown, a kind of amphibious robot based on gear type transmission, comprises robot shell, leg mechanism 4, gear transmission 11 and internal base, and described gear transmission mechanism and internal base are arranged inside the robot shell, and leg mechanism 4 comprises The four walking legs distributed on both sides of the robot shell, the four walking legs are respectively two front legs and two rear legs, and the gear transmission mechanism connects the four walking legs of the leg mechanism 4 and drives the movement of the four walking legs;
[0034]Described robot shell comprises front side plate 2, rear side plate 6, left side plate 3, right side plate 5, upper base plate 1 and lower base plate 12, front side plate 2, rear side plate 6, left side plate 3, right side Plate 5, upper base plate 1 and lower base plate 12 together form a seal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More