

Vehicle control method, device, device, storage medium and program product
A vehicle control and vehicle technology, applied in the computer field, can solve problems such as poor comfort and safety, sensor information and brake delay, large deceleration, etc., to achieve the effect of improving comfort and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
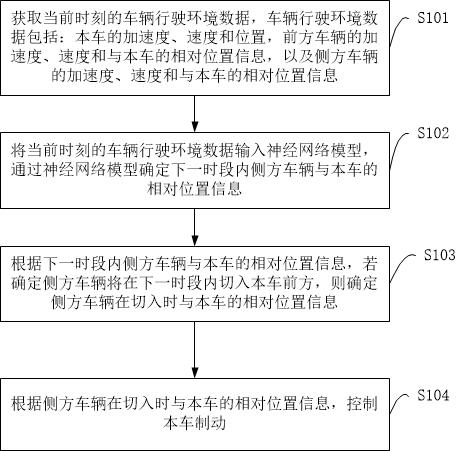
[0034] figure 1 It is a flow chart of the vehicle control method provided in Embodiment 1 of the present application. The method in this embodiment is applied to a vehicle control device. The vehicle control device may be a vehicle-mounted terminal, or a server device that remotely controls the vehicle. In other embodiments, the method may also be applied to other devices. The embodiment is schematically described by taking a vehicle control device as an example. Such as figure 1 As shown, the specific steps of the method are as follows:
[0035] Step S101. Obtain the vehicle driving environment data at the current moment. The vehicle driving environment data includes: the acceleration, speed and position of the vehicle, the acceleration, speed and relative position information of the vehicle in front, and the acceleration and speed of the vehicle on the side and relative position information with the vehicle.
[0036] In this embodiment, during the self-adaptive cruise co...
Embodiment 2
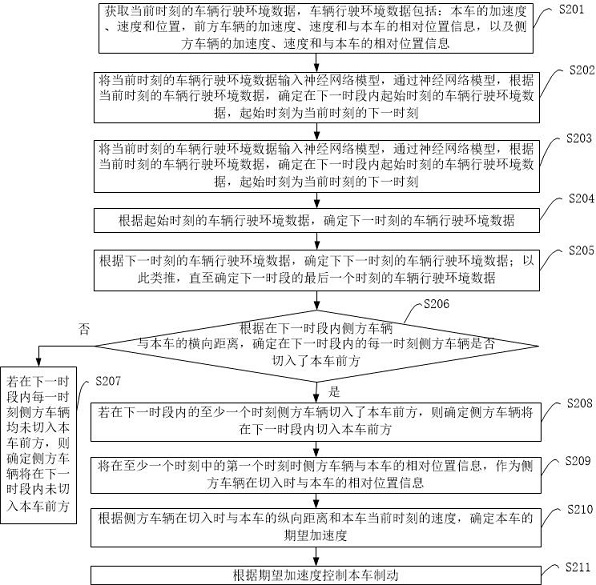
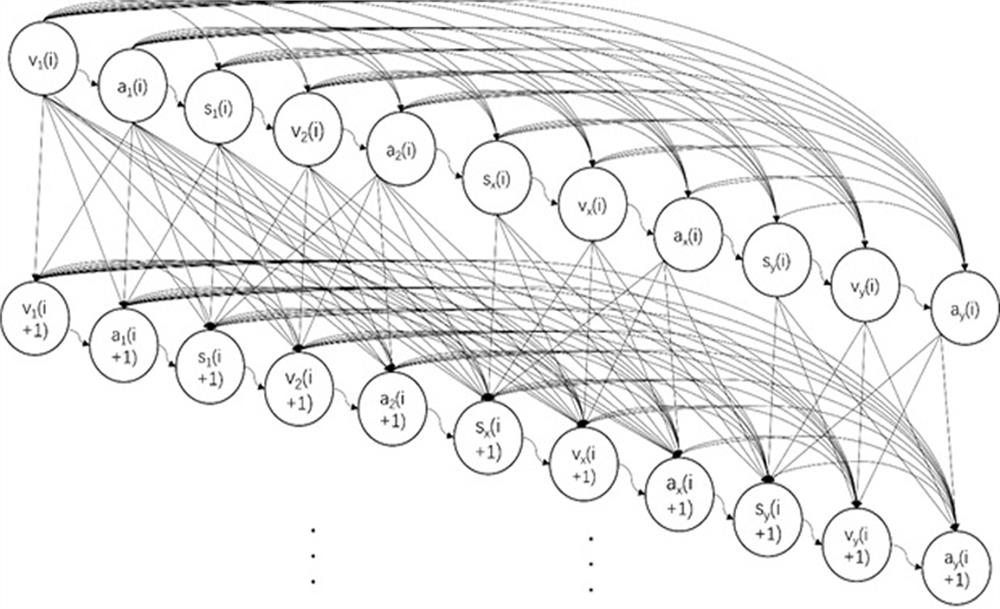
[0050] figure 2 It is a flow chart of the vehicle control method provided in Embodiment 2 of the present application. On the basis of the first embodiment above, in this embodiment, the next time period includes multiple times, and the vehicle driving environment data at any time in the next time period includes: at any time, the acceleration, speed and position of the vehicle, The acceleration, speed and relative position information of the vehicle in front, as well as the acceleration, speed and relative position information of the vehicle on the side. The neural network model can predict the vehicle driving environment data at the next moment based on the vehicle driving environment data at the current moment, and predict the vehicle driving environment data at the next moment based on the vehicle driving environment data at the next moment, so that the following can be obtained Vehicle driving environment data at multiple moments in a period of time.
[0051] Such as ...
Embodiment 3
[0108] Figure 4 It is a schematic structural diagram of the vehicle control device provided in Embodiment 3 of the present application. The vehicle control device provided in the embodiment of the present application may execute the processing procedure provided in the vehicle control method embodiment. Such as Figure 4 As shown, the vehicle control device 30 includes: a data acquisition module 301 , a prediction module 302 , a cut-in prediction module 303 and a vehicle control module 304 .
[0109] Specifically, the data acquisition module 301 is used to acquire the vehicle driving environment data at the current moment, the vehicle driving environment data includes: the acceleration, speed and position of the vehicle, the acceleration, speed and relative position information of the vehicle in front, and the relative position of the vehicle, and Acceleration, speed and relative position information of the vehicle on the side.
[0110] The prediction module 302 is used to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More