

A servo motor with encoder function and its position detection method
A servo motor and detection method technology, applied in the field of servo motor research, can solve problems that cannot be overcome at the same time, achieve the effects of improving structural strength and reliability, reducing volume, and reducing production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
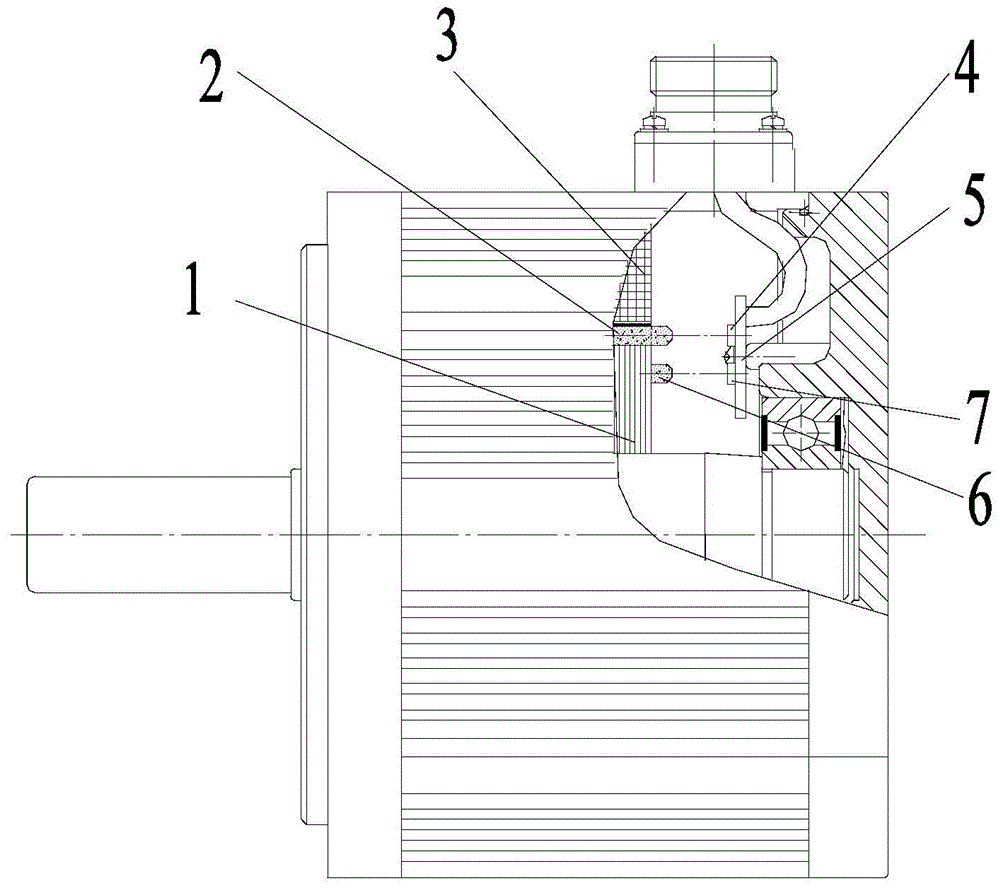
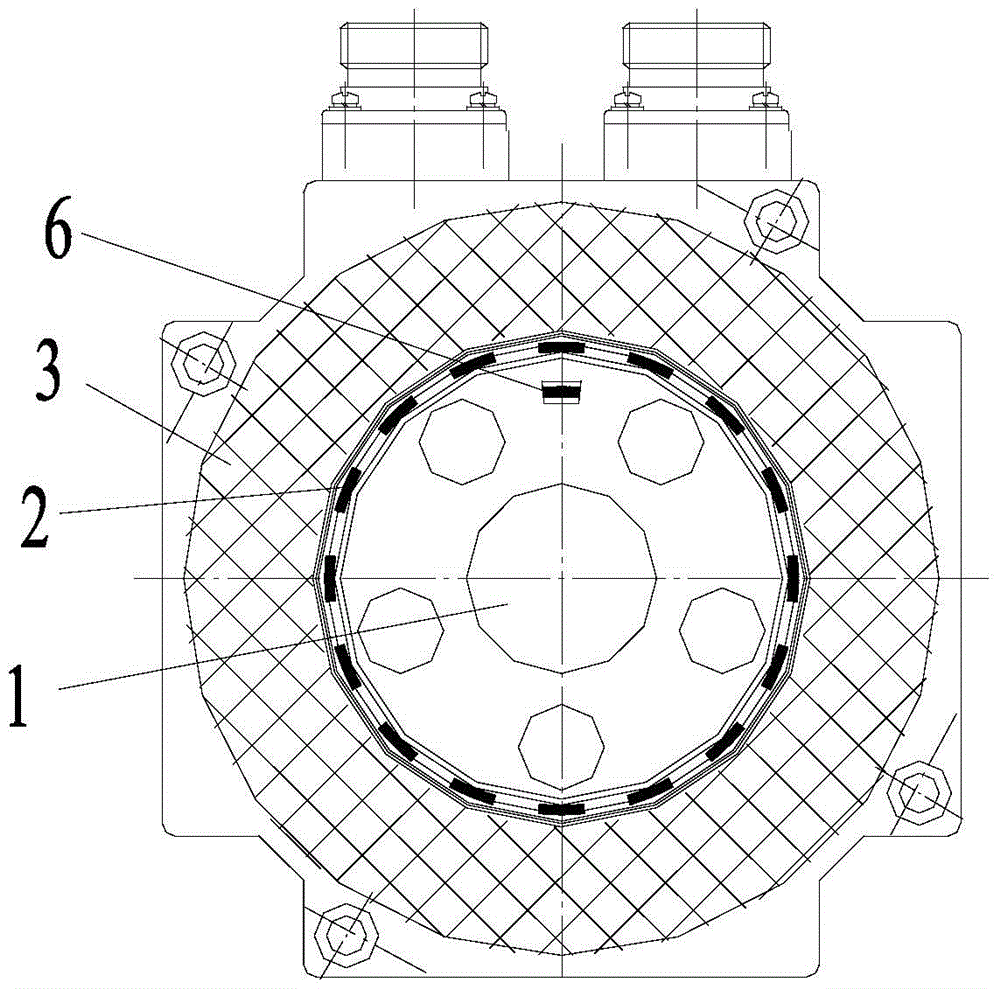
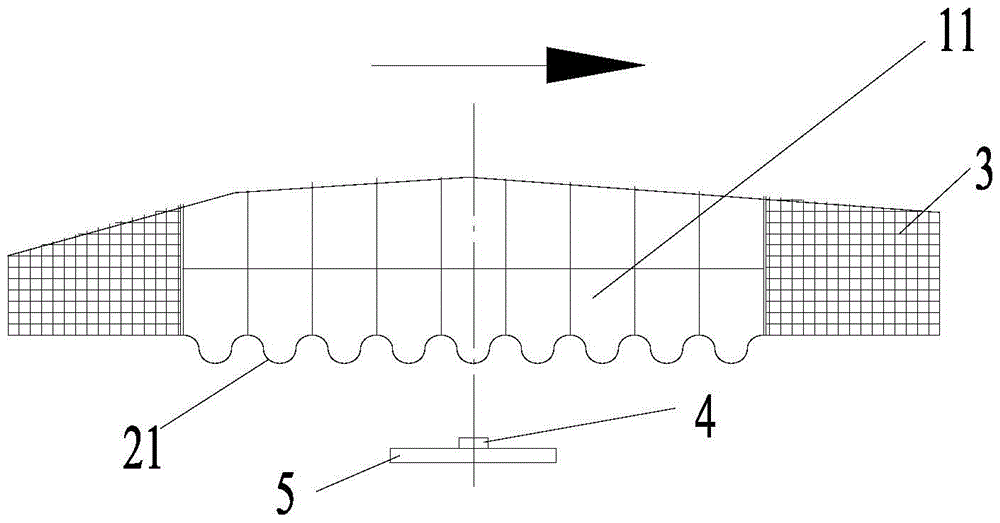
[0035] Such as figure 1 , 2 , 3, the servo motor with the encoder function described in this embodiment includes the rotor 1 and the stator 3 of the traditional motor. The present invention proposes to set the tooth structure 2 on the rotor magnetic tile 11. The tooth structure 2 of the present embodiment shape structure such as image 3 Shown in 21, it is arc-shaped. Here the toothed structure acts as the magnetic grid of the encoder.
[0036] The servo motor also includes a first Hall element 4 (Hall element A in this example), a second Hall element 8 (Hall element B in this example), a zero Hall element 7, a PCB circuit board 5 and a zero magnet 6 , wherein the first Hall element 4, the zero Hall element 7, the PCB circuit board 5, the zero magnet 6, and the positional relationship between the rotor magnetic tile 11 are as follows figure 1 , 2 , 3, the position of the zero point magnet 6 in the motor is as follows figure 2 shown.
[0037] Such as Image 6 As shown,...
example 1
[0053] Example 1: Assume that the current motor rotor rotates to the 14th magnetic grid period, and Figure 14 At point A, since point A is within the interval of 0 to T / 8, it is an increasing interval, so after AD samples sinθ and cosθ values, calculate |tanθ| value, |tanθ|=210, look up the table to get the subdivision 0X0F, the 14th magnetic grid cycle is converted to 0X0E of 16 progress, the magnetic grid cycle number is high, and the subdivision value is low, combined: 0X0E&0X0F=0X0E0F, so the current absolute position value of point A is 0X0E0F.
example 2
[0054] Example 2: Assume that the current motor rotor rotates to the 60th magnetic grid period, and Figure 14 At point B, because point B is within the interval of 5T / 8~3T / 4, it is a decreasing interval, so after AD samples the values of sinθ and cosθ, calculate |cotθ| value, |cotθ|=105, look up the table The score is 0XB6, the 60th magnetic grid cycle is converted to 0X3C with 16 progress, the magnetic grid cycle number is high, and the subdivision value is low, merge: 0X3C&0XB6=0X3CB6, so the current absolute position value of point B is 0X3CB6.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More