

Hexapod robot
A hexapod robot and robot technology, applied in the field of robots, can solve the problems of large overall quality of the robot, unfavorable practical application, many driving motors, etc., and achieve the effects of preventing jamming, low pressure, and small transmission size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof. However, the protection scope of the claims of the present application is not limited to the description scope of the embodiments.
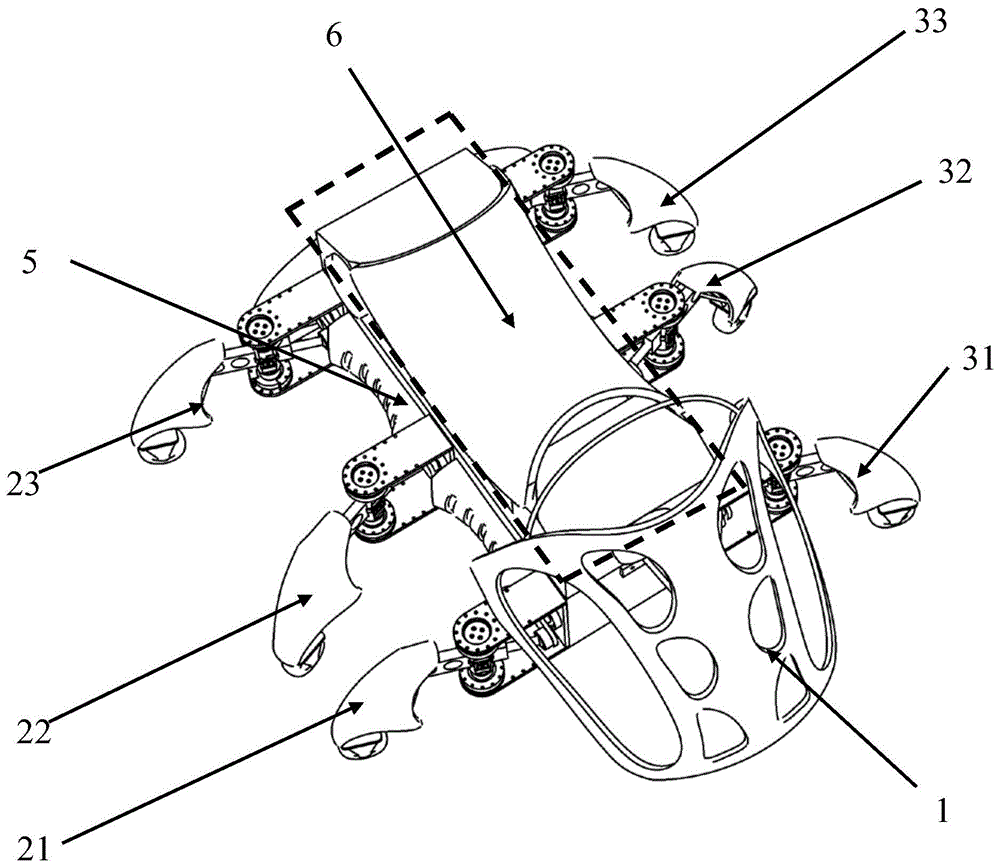
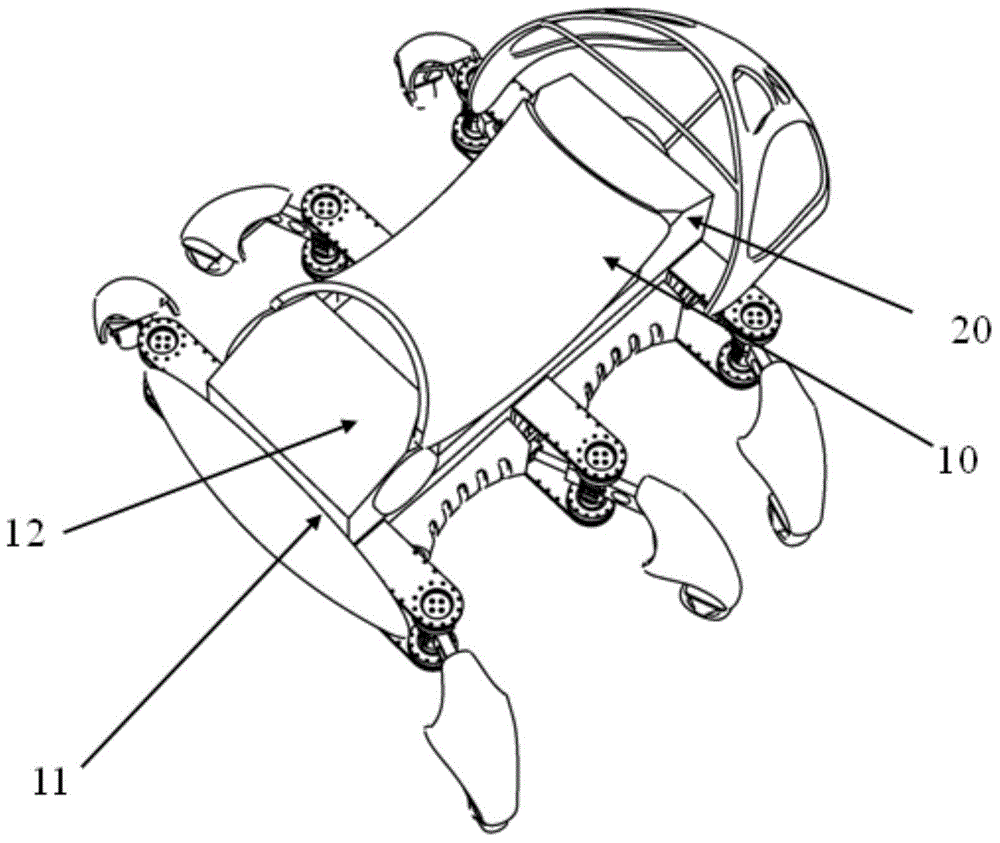
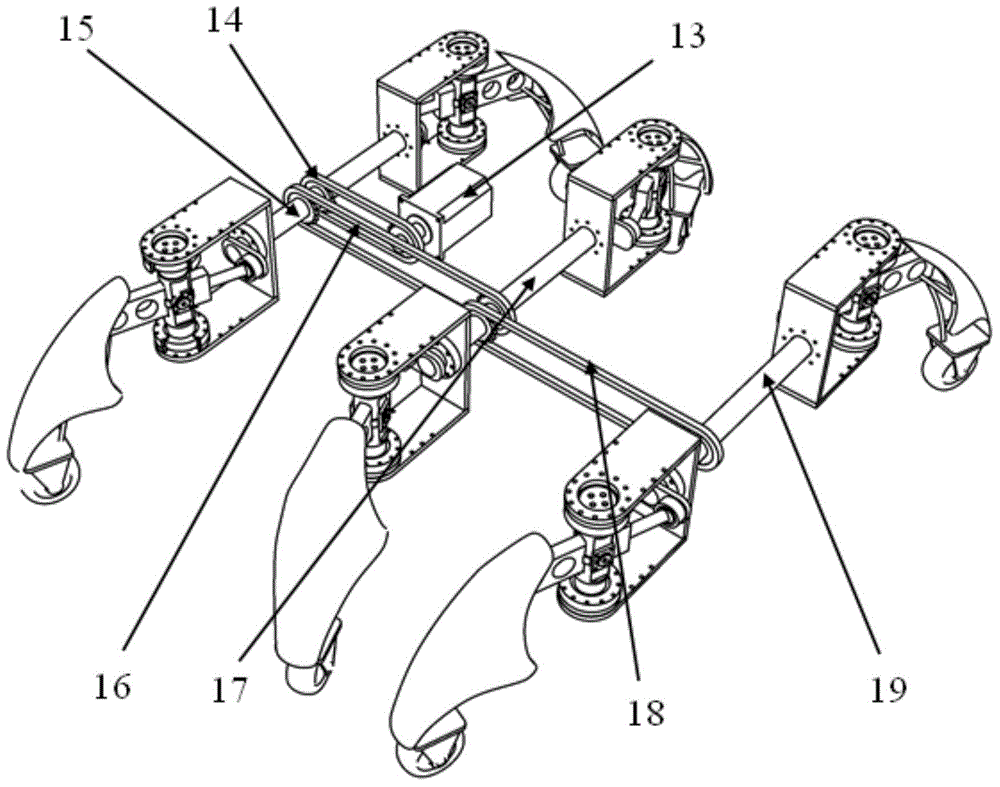
[0028] A kind of hexapod robot (being called for short robot of the present invention design, see Figure 1-8 ), which has the characteristics of high load and low energy consumption. It mainly includes head 1, body 6 and six mechanical legs 2, six mechanical legs 2 include right front leg 21, right middle leg 22, right rear leg 23, left front leg 31, left middle leg 32 and left rear leg 33, six mechanical legs Leg 2 is evenly distributed on both sides of the long side of the body 6, that is, the right front leg 21, the right middle leg 22 and the right rear leg 23 are installed on the long side side of the body 6, the left front leg 31, the left middle leg 32 and the left rear The legs 33 are installed on the other side of the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More