

A robot positioning and navigation system and its navigation method
A technology of robot positioning and navigation system, applied in the field of robot positioning and navigation system, can solve the problems of robots getting lost, unable to automatically plan detours, unable to work normally, etc., to improve accuracy, solve non-line-of-sight propagation, and solve attenuation problems Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The detailed structure of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
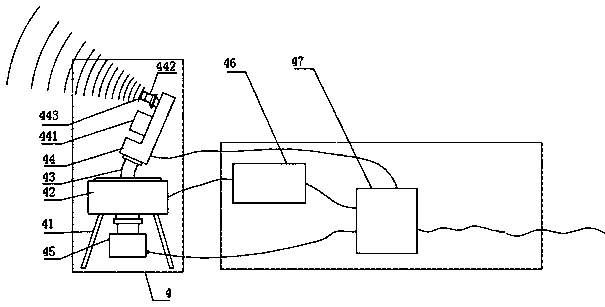
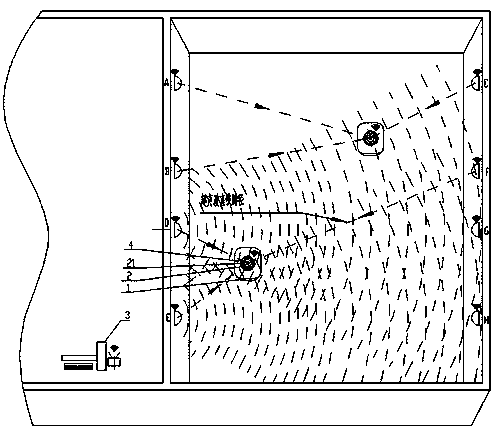
[0069] A robot positioning and navigation system includes multiple beacon modules, at least one robot positioning terminal, an obstacle scanner and an electronic navigation platform. The robot positioning terminal is installed on the robot, and the robot can carry different numbers of robot positioning terminals according to the needs. The position of the beacon module must be fixed, so as to obtain fixed position coordinates, which can be installed on the wall or other fixed objects (the placement position is not specifically required), and the specific number is determined according to the space size of the undetermined position. A plurality of position coordinates are set on the motion trajectory of the robot, and at least two beacon modules required for each of these position coordinates are calculated and planned....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More