

Servo loop decoupling method for three-axis stabilization platform system
A technology for stabilizing the platform and servo loops, applied in the direction of navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve the problem that the working range of the inner frame cannot be too large
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
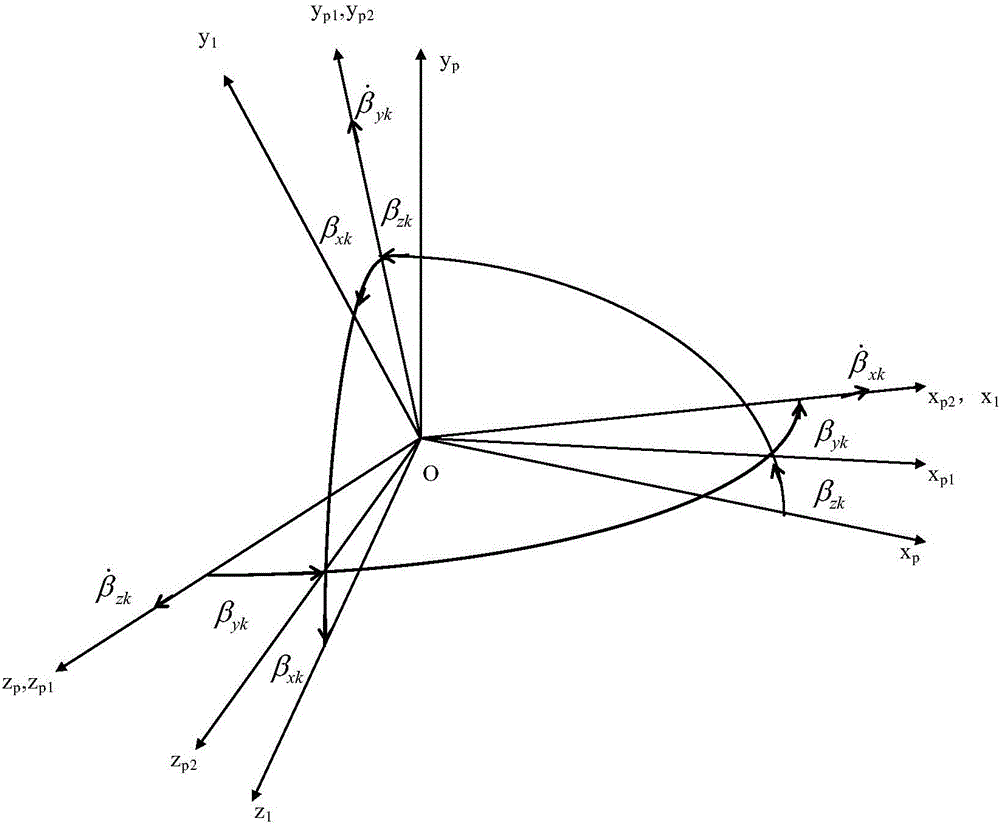
[0075] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =0; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =0; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0; that is, the three rotation axes are perpendicular to each other.
[0076] Calculation formula is provided according to the present invention:
[0077] ω z = ω z p ;
[0078] ω y = ω y p ;
[0079] ω x = ...
Embodiment 2
[0082] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =0°; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =90; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0.
[0083] Calculation formula is provided according to the present invention:
[0084] ω z = ω z p ;
[0085] ω y = ω y p ;
[0086] ω x = - β · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More