

Servo loop decoupling method for four-axis inertial stabilized platform
A technology for stabilizing the platform and servo loop, applied in the field of inertial measurement, can solve the problem of incomplete controllability of the servo loop, and achieve the effect of avoiding the gain tending to infinity and wide applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
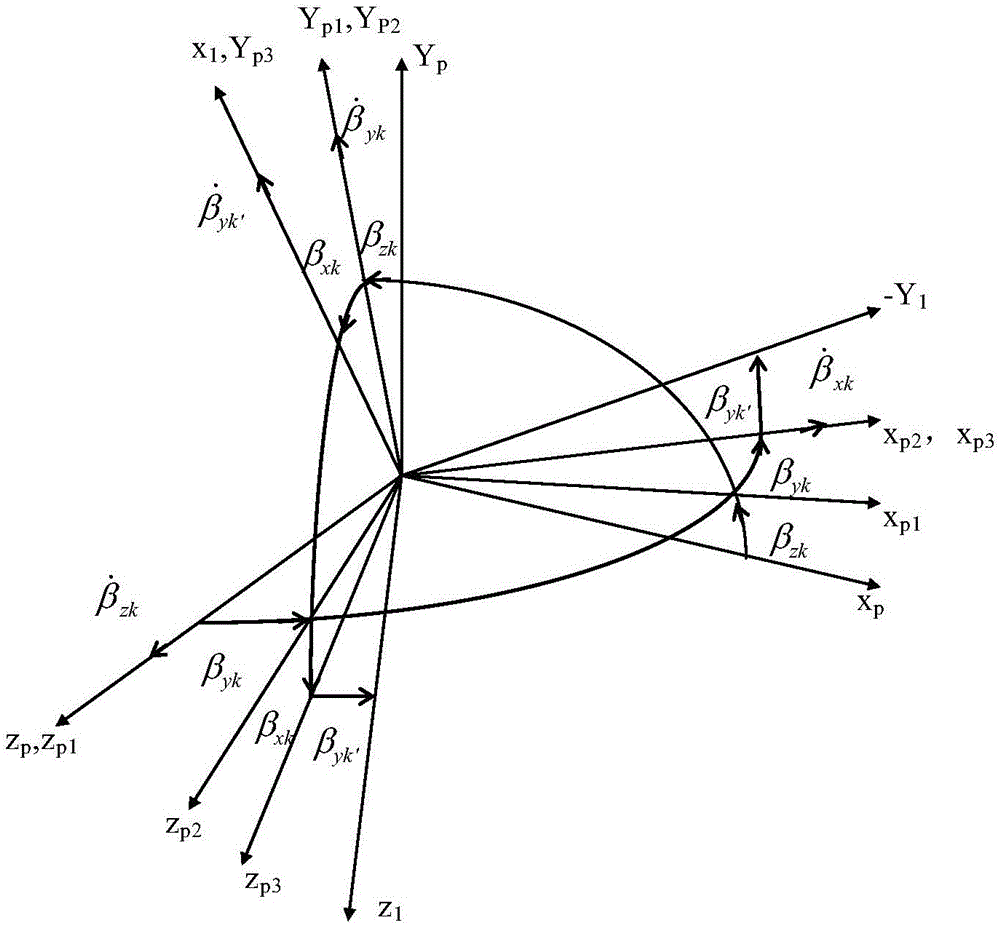
[0067] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =0; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =0; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0; that is, the three rotation axes are perpendicular to each other.
[0068] Calculation formula is provided according to the present invention:
[0069] ω z = ω z p ;
[0070] ω y = ω y p ;
[0071] ω x = ...
Embodiment 2
[0075] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =90°; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =0; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0.
[0076] Calculation formula is provided according to the present invention:
[0077] ω z = ω z p ;
[0078] ω y = ω y p ;
[0079] ω x = ω x p ...
Embodiment 3
[0083] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =90°; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =90°; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0.
[0084] Calculation formula is provided according to the present invention:
[0085] ω z = ω z p ;
[0086] ω y = ω y p ;
[0087] ω x = - β · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More