

A servo loop decoupling method for a three-axis stabilized platform system
A technology for stabilizing the platform and servo loop, applied in the direction of navigation through speed/acceleration measurement, navigation calculation tools, etc., can solve the problem that the working range of the inner frame cannot be too large
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
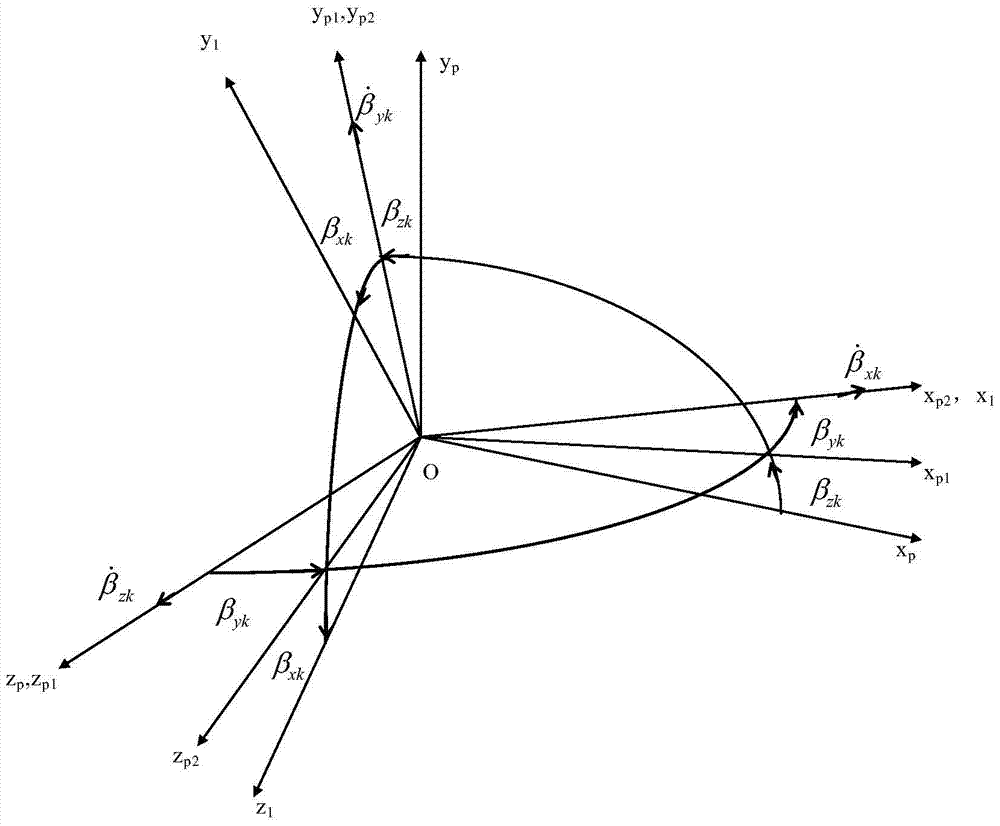
[0075] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =0; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =0; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0; that is, the three rotation axes are perpendicular to each other.
[0076] Calculation formula is provided according to the present invention:
[0077]
[0078]
[0079]
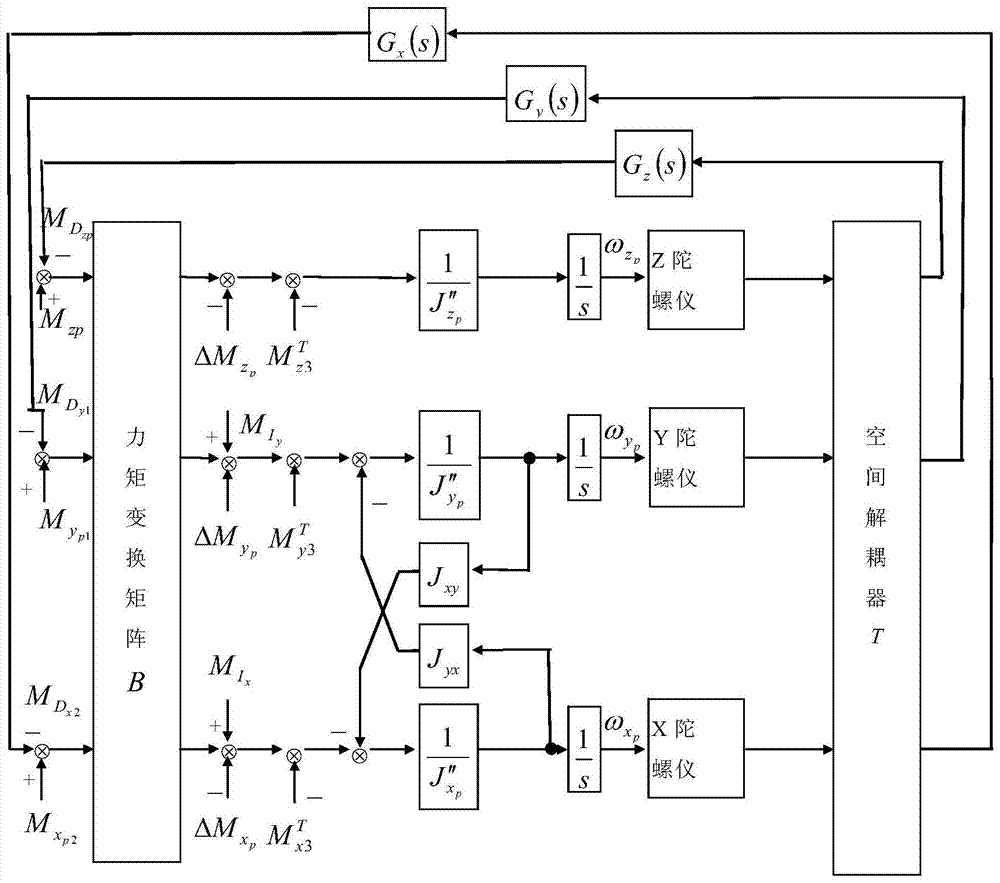
[0080] From the above calculation results, it can be seen that the input values of the three-axis controller of the platform are consistent with the measured values of the respective gyroscopes.
Embodiment 2
[0082] In this embodiment, the decoupling calculation is performed using the calculation formula of the present invention, wherein the setting conditions are as follows: the base surrounds the outer frame coordinate system X p2 Angle of shaft rotation β xk =0°; the outer frame revolves around the coordinate system Y of the inner frame p1 Angle of shaft rotation β yk =90; the inner frame revolves around the body coordinate system Z p Angle of shaft rotation β zk =0.
[0083] Calculation formula is provided according to the present invention:
[0084]
[0085]
[0086]
[0087] From the above calculation results, it can be seen that the controller input of the table body axis and the inner frame axis are consistent with the measured values of their respective gyroscopes, but the controller input of the outer frame axis has nothing to do with the gyroscope, but only depends on the table body axis The frame angular rate of , which solves the problem of attitude con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More