

Scale Factor Determination Method for Monocular Vision Reconstruction Based on Point Structured Light Ranging
A technology of scale factor and point structured light, which is applied in the field of computer vision and can solve problems such as limited applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail in conjunction with the accompanying drawings.
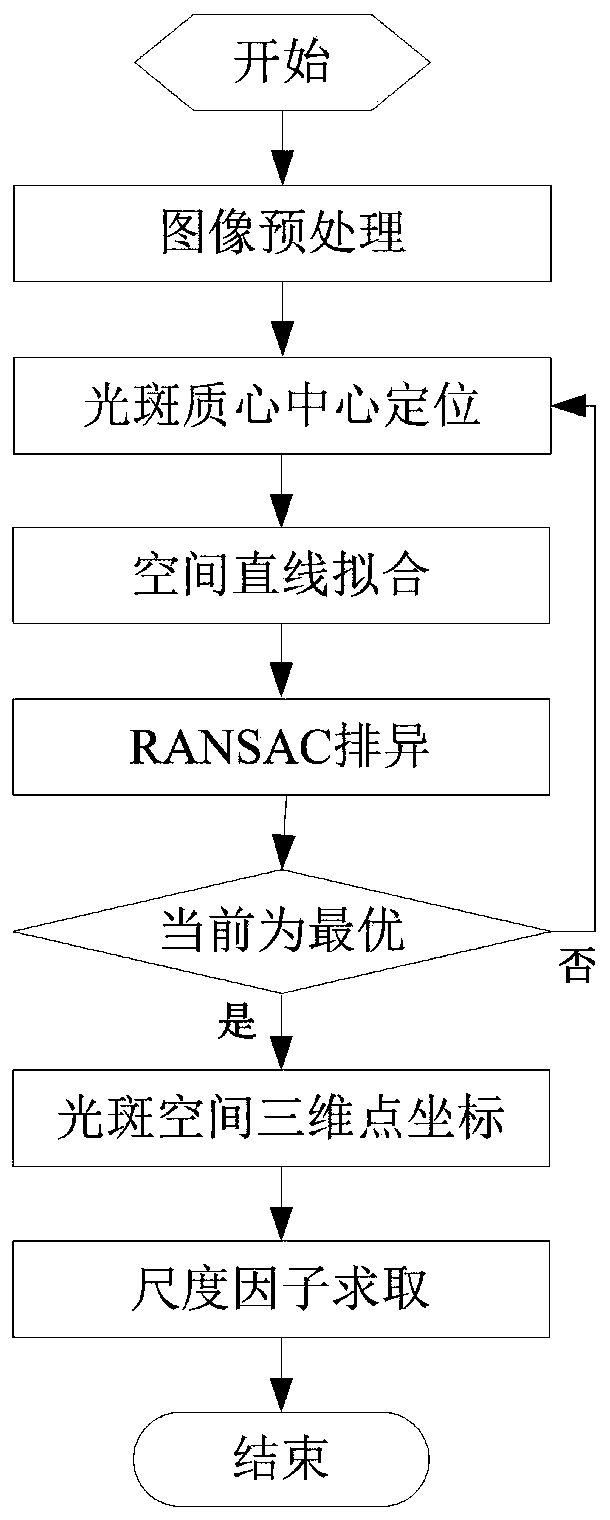
[0026] The present invention specifically includes the following steps.
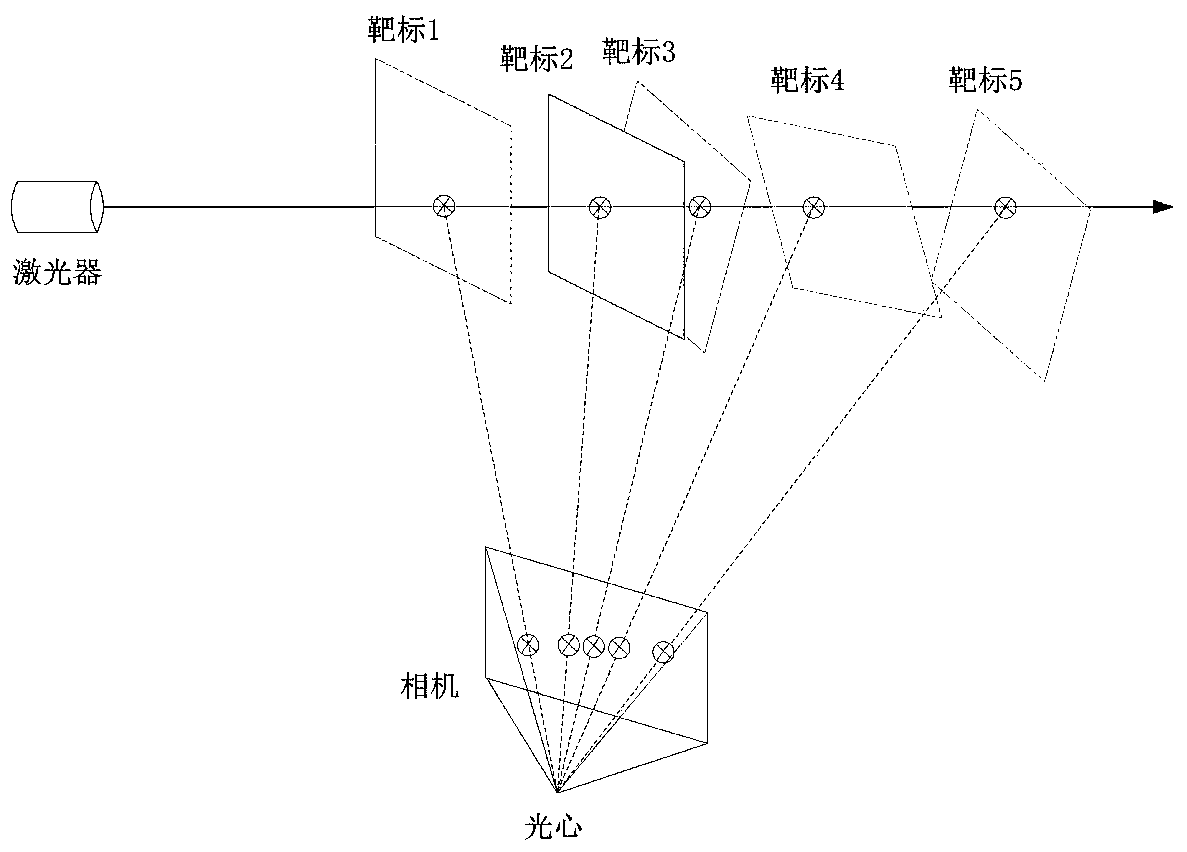
[0027] (1) Center positioning of spot light spot
[0028] The image is preprocessed through various filtering or threshold selection methods, and then the centroid of the image spot is located. After processing the entire image pixel, according to the cumulative value of the final centroid parameter group of each spot, the row and column coordinates of the centroid are calculated according to the following first-order moment centroid calculation formula:
[0029]
[0030] In the above formula, I(x, y) represents the gray value of the input image pixel, x, y is the row and column coordinates corresponding to the pixel, and X c ,Y c are the row and column coordinates of the spot centroid, respectively.
[0031] (2) Laser ray equation fitting with RANSAC elimination mechanism
[0032] RANS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More