A seven-degree-of-freedom upper limb assisting exoskeleton robot
An exoskeleton robot and technology of degrees of freedom, applied in the field of rehabilitation robots, can solve problems such as being unable to assist stroke patients in daily self-care activities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
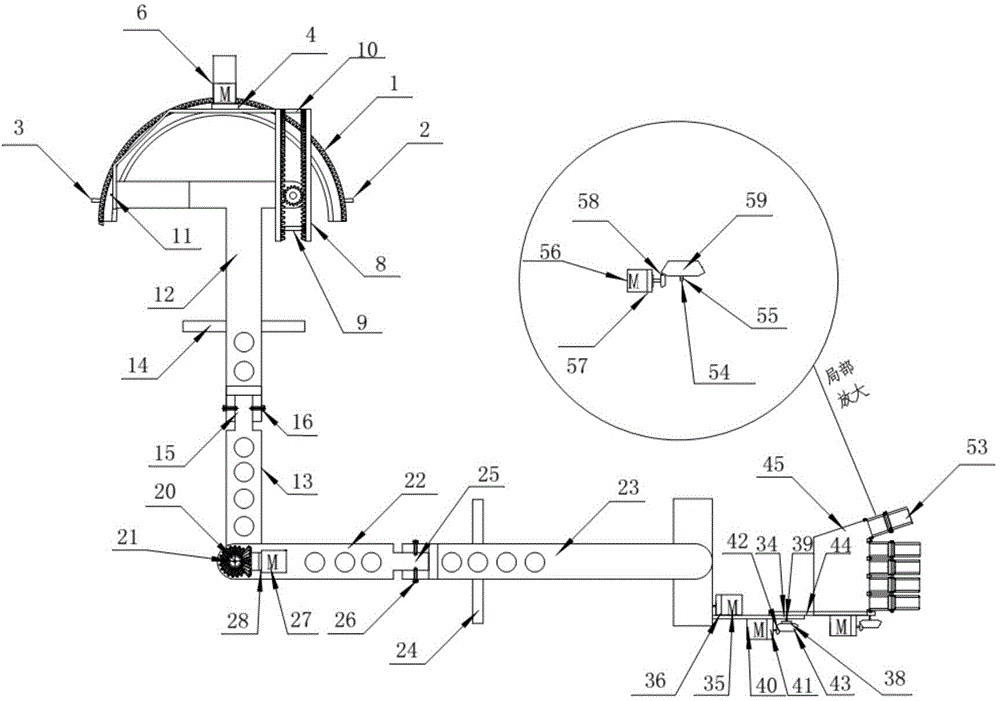
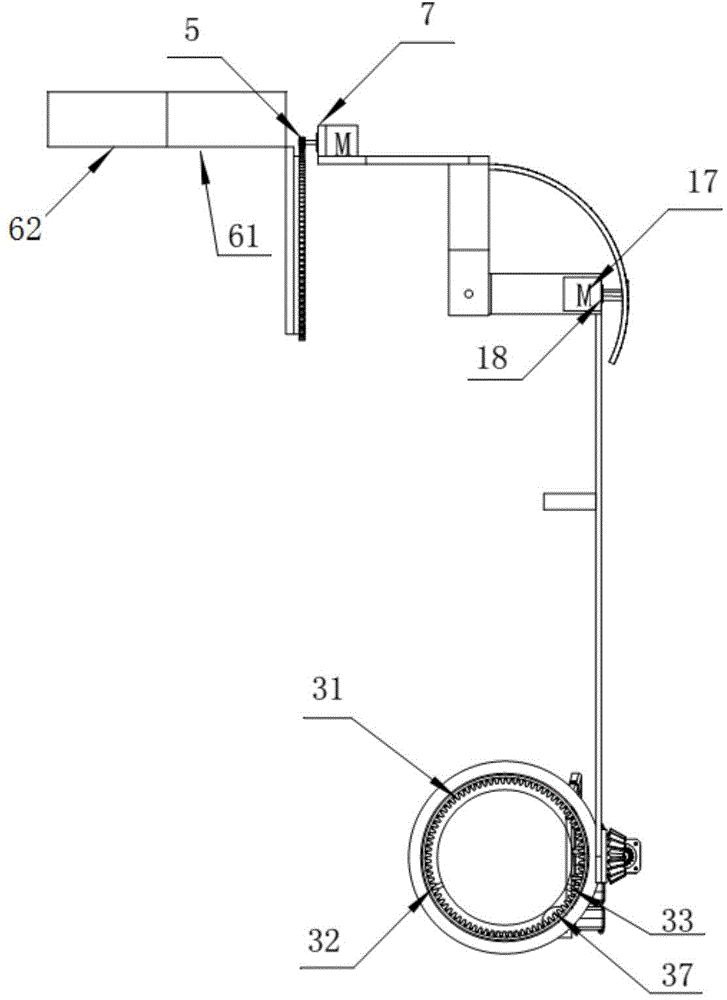
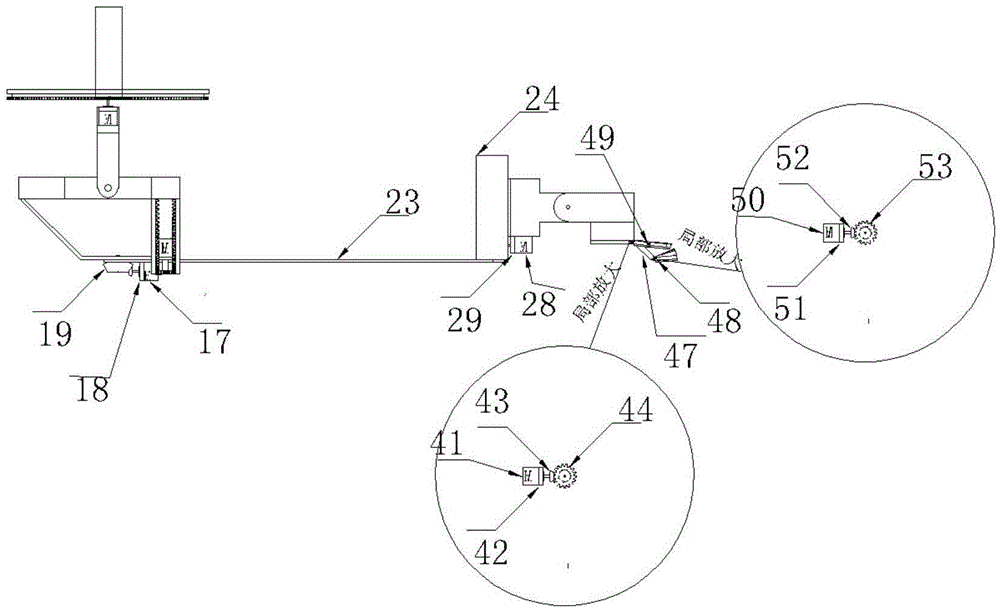
[0026] A seven-degree-of-freedom upper limb assisted exoskeleton robot, such as Figure 1 to Figure 4 shown, including the wrist, palm and fingers, where:
[0027] The palm is also connected with the wrist, the wrist includes the wrist ring rack and the wrist slider arranged on the wrist ring rack, the wrist slider is provided with a servo motor four with an encoder and a harmonic reducer four, the servo motor The output end of the fourth is connected to the input end of the harmonic reducer four, the output end of the harmonic reducer four is connected to the bevel gear five, and the bevel gear five is connected to the wrist ring rack;
[0028] The palm part includes a palm guard plate, and the servo motor six and the harmonic reducer six with an encod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More