

A Calibration Method of Absolute Position Signal of Hybrid Photoelectric Encoder
A photoelectric encoder and absolute position technology, which is applied in the control of electromechanical brakes, control of electromechanical transmission devices, electrical components, etc., can solve the problems of great influence on the starting performance of servo motors, affecting the control performance of servo systems, and low accuracy of absolute position signals , to achieve the effects of easy promotion and use, saving manpower and material resources, and high calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
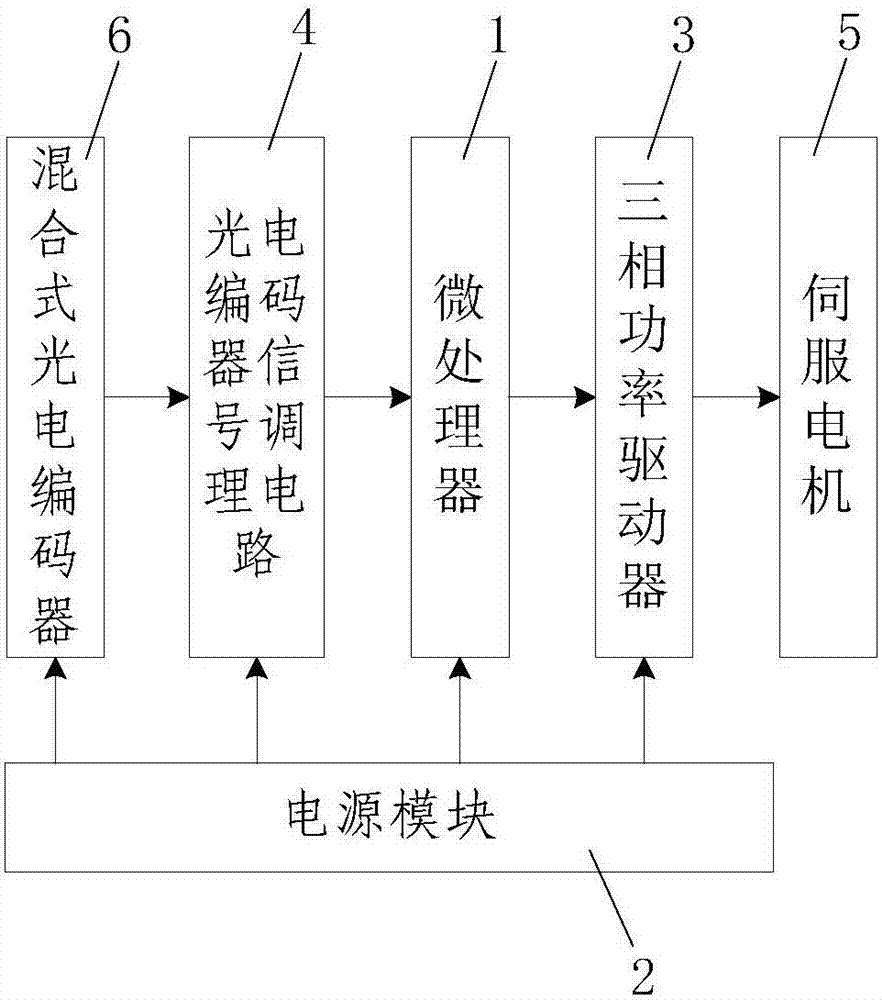
[0034] Such as figure 1 As shown, the absolute position signal calibration system of the hybrid photoelectric encoder of the present invention includes a microprocessor 1 and a power supply module 2 for powering each power unit in the system, and the input terminal of the microprocessor 1 is connected with a The photoelectric encoder signal conditioning circuit 4 for amplifying and filtering the absolute position signal and relative position signal of the servo motor 5 rotation detected by the hybrid photoelectric encoder 6, the input terminal of the photoelectric encoder signal conditioning circuit 4 is connected to the hybrid The output terminal of photoelectric encoder 6 is connected, and the output terminal of described microprocessor 1 is connected with the three-phase power driver 3 that is used to drive the servomotor 5 that hybrid photoelectric encoder is housed, and described servomotor 5 and three-phase power driver 3 output connections.
[0035] In this embodiment,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More